ROS2入门教程-rqt简介

ROS2入门教程-rqt简介
说明:
- 本文介绍如何认识rqt
- rqt是一个通过界面来使用ROS的桌面框架,通过插件的方式来扩展相关功能.
- rqt插件可以单独使用,也可以在rqt框架里使用
rqt界面:
- 打开rqt
rqt
- 如图:
- 包含多个插件类型
- 如图:
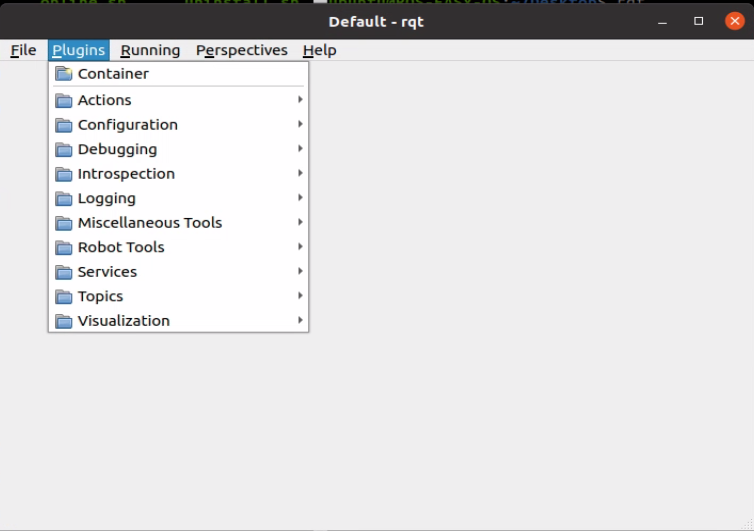
- 插件类型说明:
Container #容器相关
Actions #动作相关, 比如查看动作类型
Configuration #配置相关, 比如配置动态参数
Debugging #调试相关, 比如录制bag
Intorspection #节点相关, 比如查看节点图
Logging #日志相关
Miscellaneours Tools #杂项,比如shell管理
RobotTools #机器人相关,比如控制转向
Services #服务相关,比如调用服务
Topics #话题相关,比如发布话题
Visualization #视觉相关,比如查看图像, TF, 曲线图等常用功能:
- 1.动作类型浏览器 /
Plugins -> Actions ->Action Type Browser - 查看turtlsim的RotateAbsolute动作类型
- 效果图:
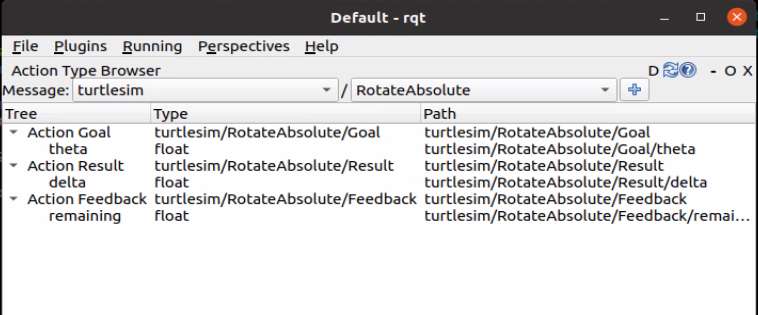
-
目标为theta即给出的角度, result为结果delta即完成的角度, Feedback为中间值即还剩余的角度
-
2.参数重配置 /
Plugins -> configuration ->Parameter Reconfigure -
查看turtlsim的可配置参数
-
效果图:

- 通过background_b g r几个值动态配置小乌龟窗口的背景色
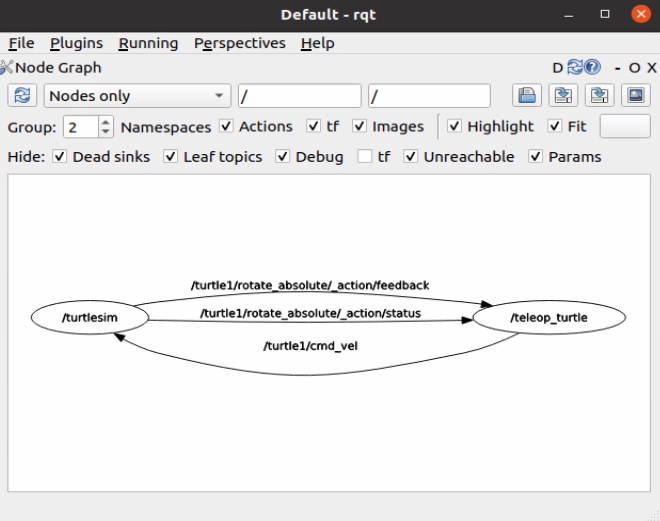
- 3.节点图/Node Graph
- 查看turtlsim节点图
- 效果图:
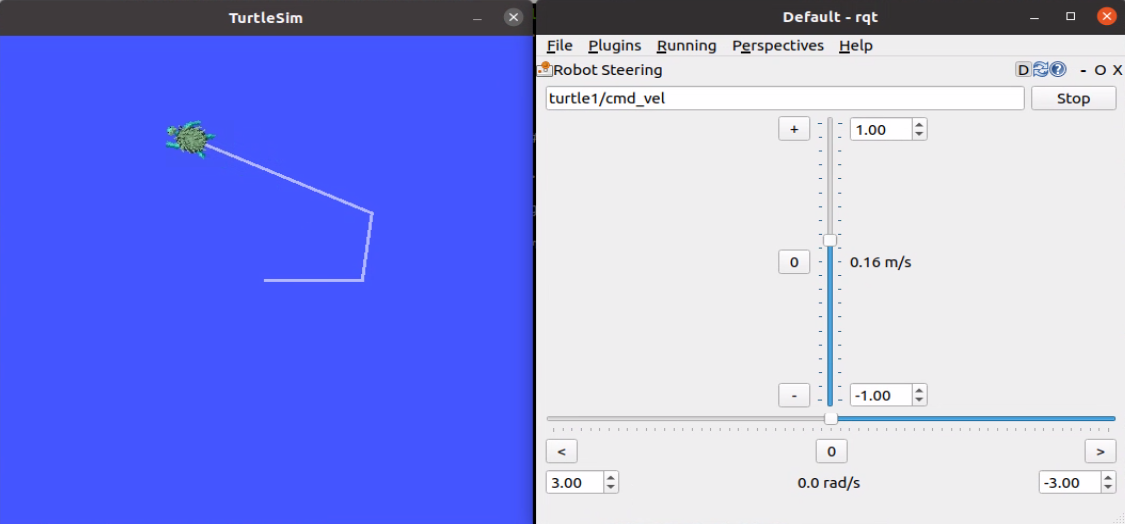
- 4.控制转向/
Plugins -> Robot Tools -> Robot Steering - 控制turtlesim移动
- 效果图
-
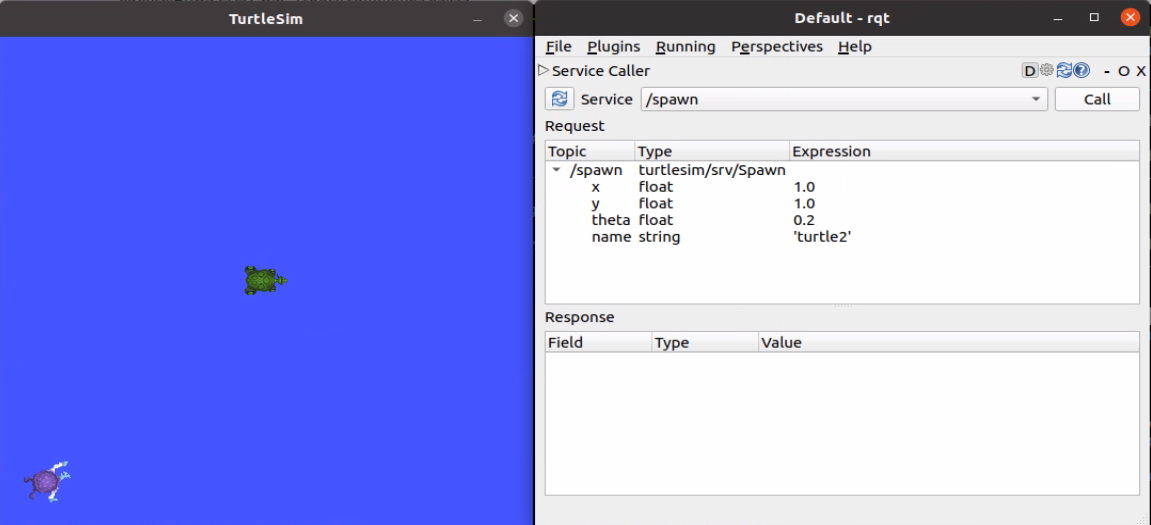
- 服务调用/
Plugins -> Services -> Service Caller
- 服务调用/
- 通过它实现增加小乌龟, 在Turtlesim的窗口里,坐标1,1的位置生成turtle2小乌龟
- 效果图:
-
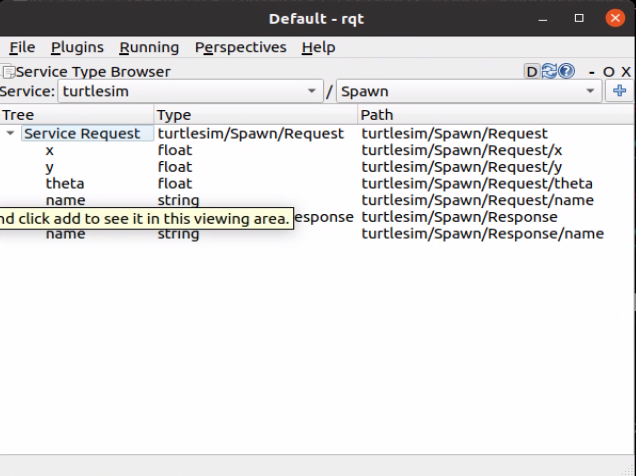
- 服务类型浏览器
Plugins -> Services -> Service Type Browser
- 服务类型浏览器
- 查看turtlesim/spawn服务类型, 了解请求和回复的相关内容
- 效果图
-
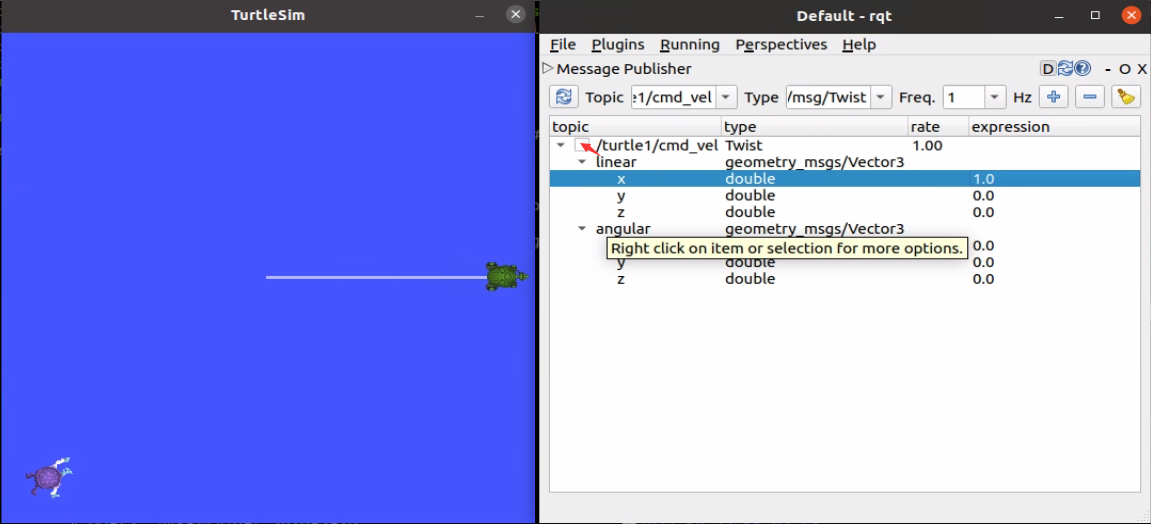
- 消息发布
Plugins -> Topics -> Message Publisher
- 消息发布
-
发布速度消息控制turtlesim移动, x,y填入速度值,打勾既可发布
-
效果图
-
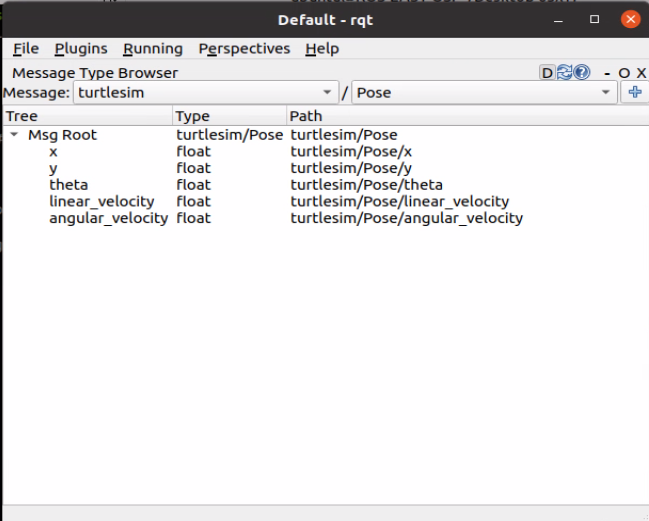
- 消息类型浏览器
Plugins -> Topics -> Message Type Browser
- 消息类型浏览器
-
查看turtlesim的话题pose的消息类型
-
效果图
-
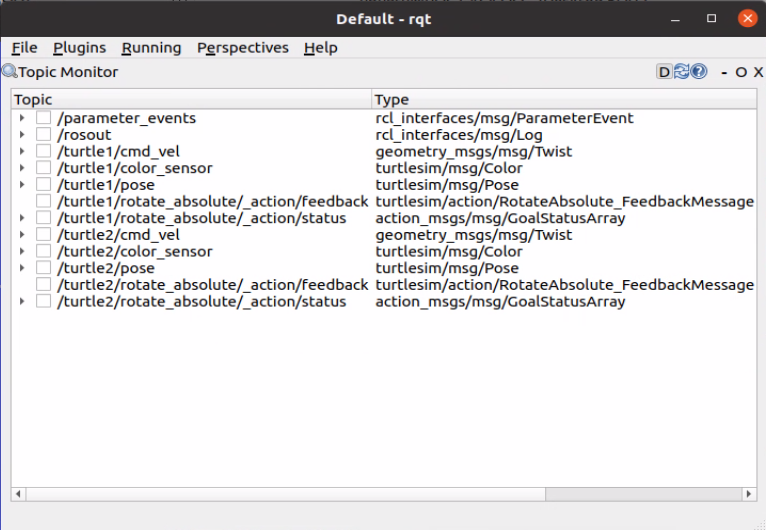
- 话题列表
Plugins -> Topics -> Topic Monitor
- 话题列表
- 效果图
-
- 图像查看器
Plugins -> Visualization -> Image View
- 图像查看器
- 查看图像内容, 选择对应图像话题,既可显示, 目前暂没图像话题, 可以看看界面
- 效果图
-
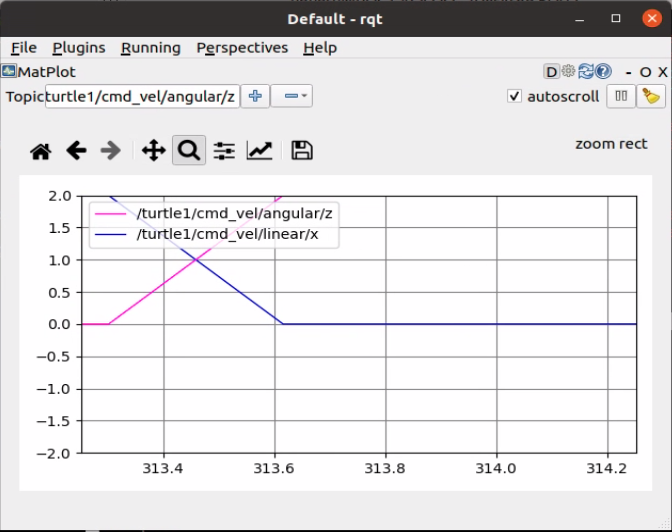
- 绘制曲线图
Plugins -> Visualization -> Plot
- 绘制曲线图
- 通过数值绘制曲线图,比如速度曲线
- 效果图
-
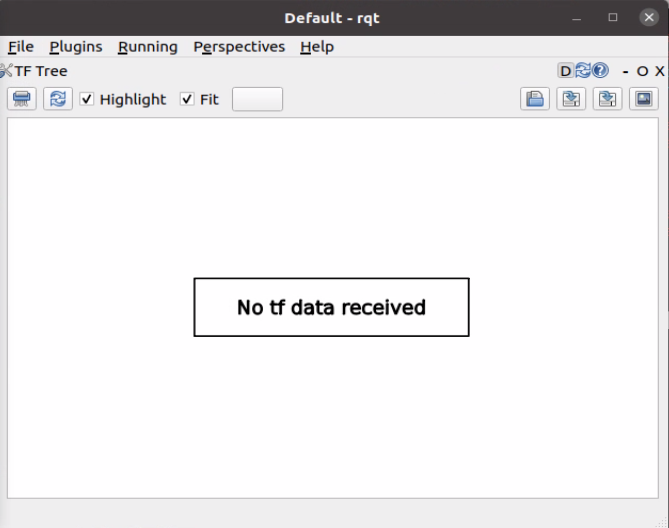
- 图像查看器
Plugins -> Visualization -> TF Tree
- 图像查看器
- 查看TF树, TF功能比较重要, 很多时候机器人在rviz不能正常显示,大多可能是TF不完整,导致各个节点之间不能正常通讯
- 可以通过查看TF,确认问题点, 目前Turtlesim没有发布TF,这个只是打开界面