



















Turbot3-Multi与仿真教程-多机绘图导航-图形
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turbot3-Multi与仿真教程-多机绘图导航-图形
说明:
- 介绍如何实现多机绘图功能
- 利用航点绘制一个图形的航点,每台从机都选择一个航点作为目标点实现导航,都到达目标点之后形成一个相应的图形。
- 本次是仿真采用6台小车完成
相关设备:
- Turbot3-Multi套件,采购地址
步骤:
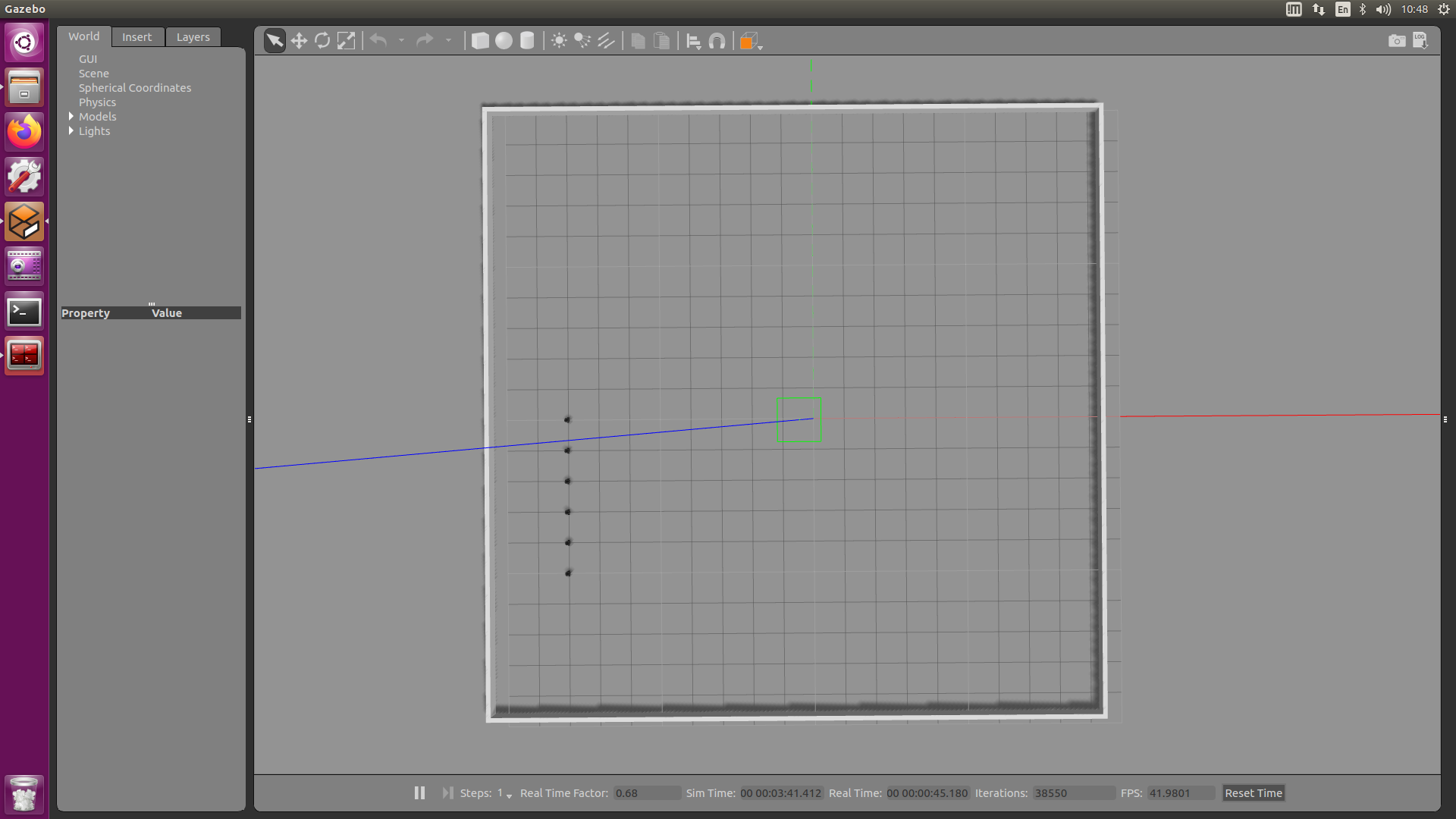
- 新开终端,启动仿真
./multi_scripts/multi_gazebo_bigmap.sh- 调整gazebo坐标轴方向,X向右,Y向上。
- 效果如图:
- 新开终端,启动导航
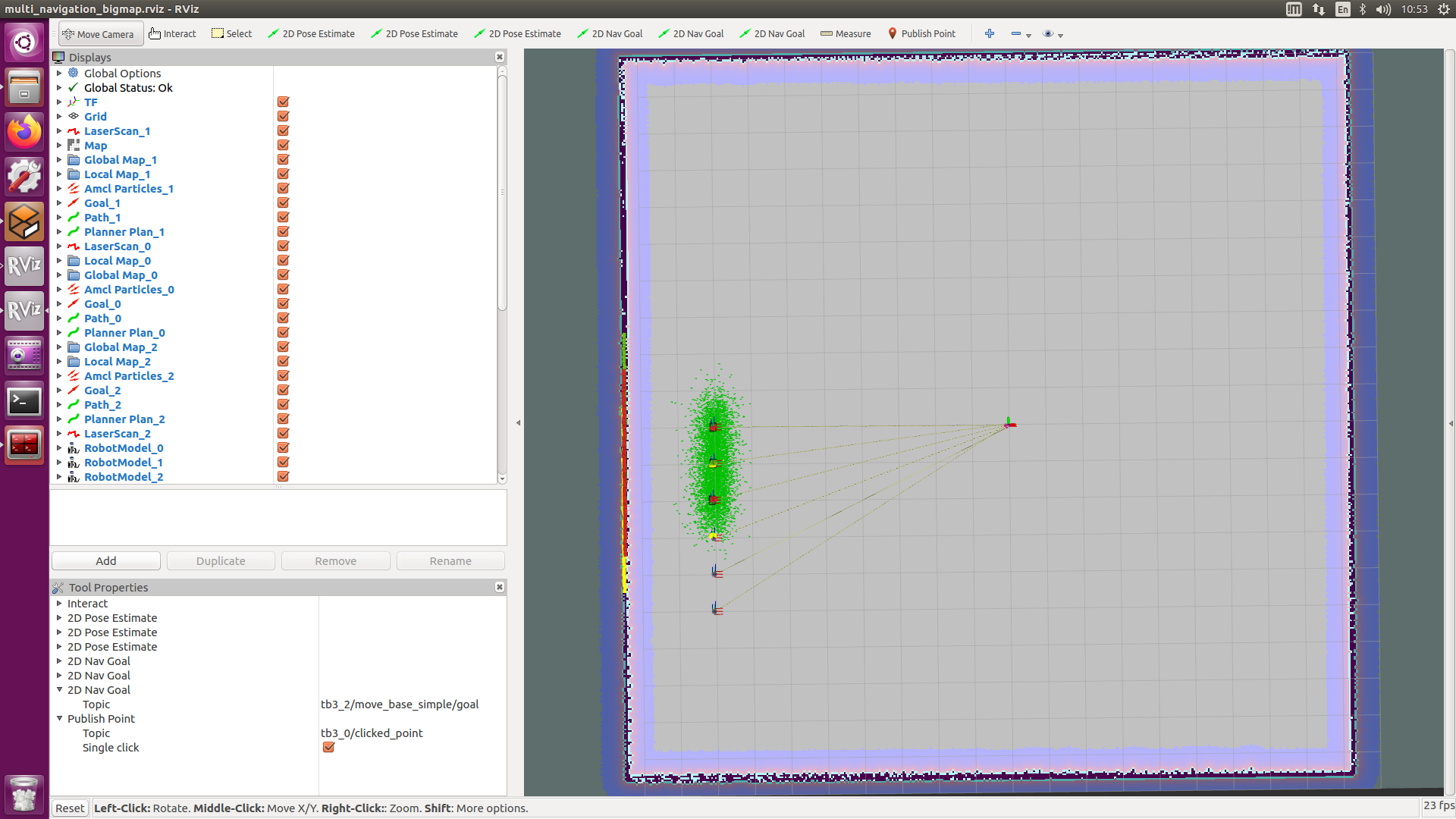
./multi_scripts/multi_init_pose_bigmap.sh- 新开终端,启动rviz
./multi_scripts/multi_nav_bigmap.sh- 调整rviz坐标轴方向,X向右,Y向上。
- 效果如图:
绘制直线航点并进行导航:
- 新开终端,启动绘制
./multi_scripts/multi_draw_generator.sh line- 指定保存的航点文件名为line.yaml . 具体文件位于
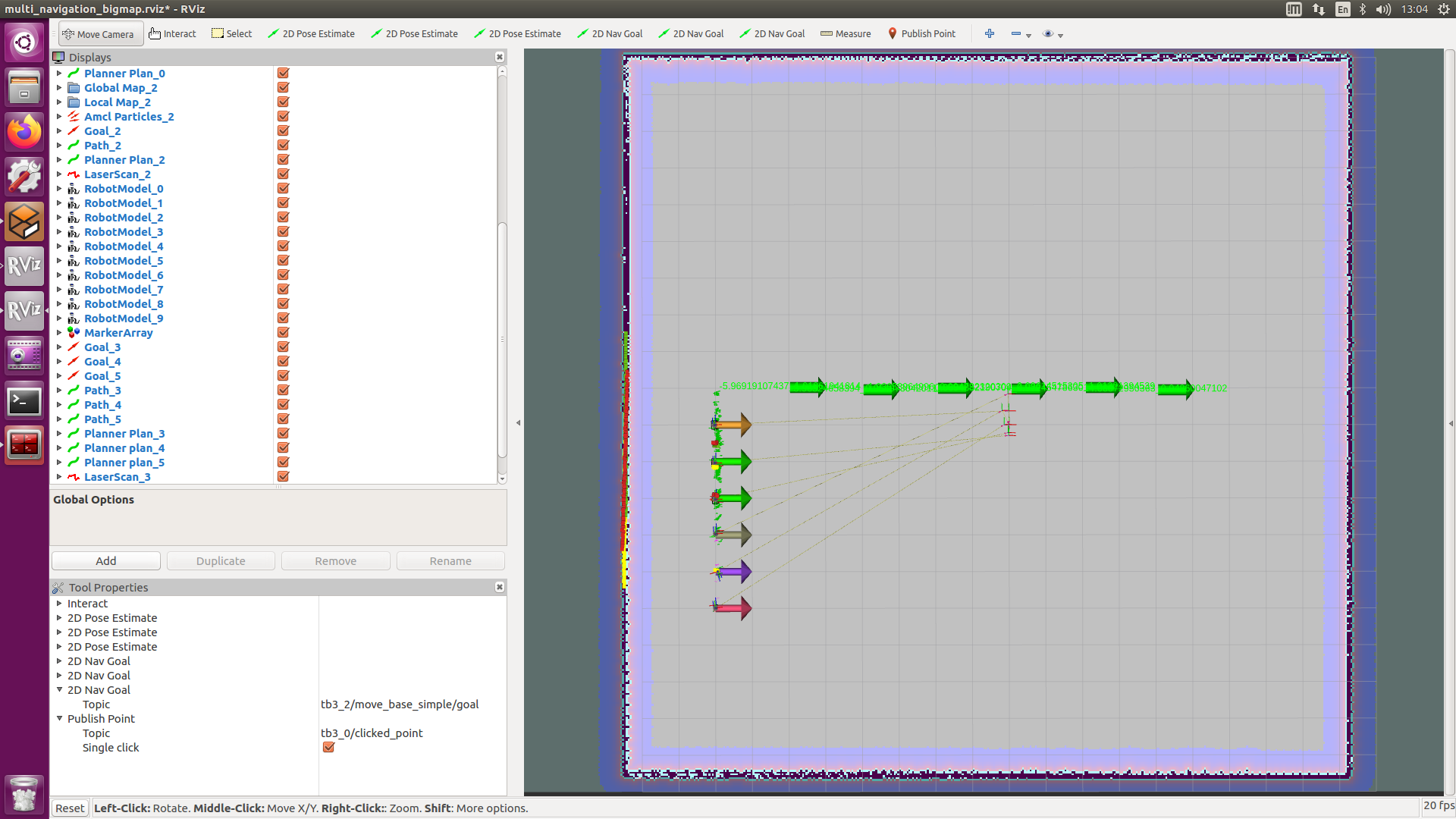
roscd turbot3_waypoint/data就可以看到 - 在rviz上,点击publish points工具,再地图上选择相应的点,选择六个点形成一条直线
- 都完成之后,ctrl+c 即可中止,自动保存航点数据到line.yaml文件
- 效果如图:
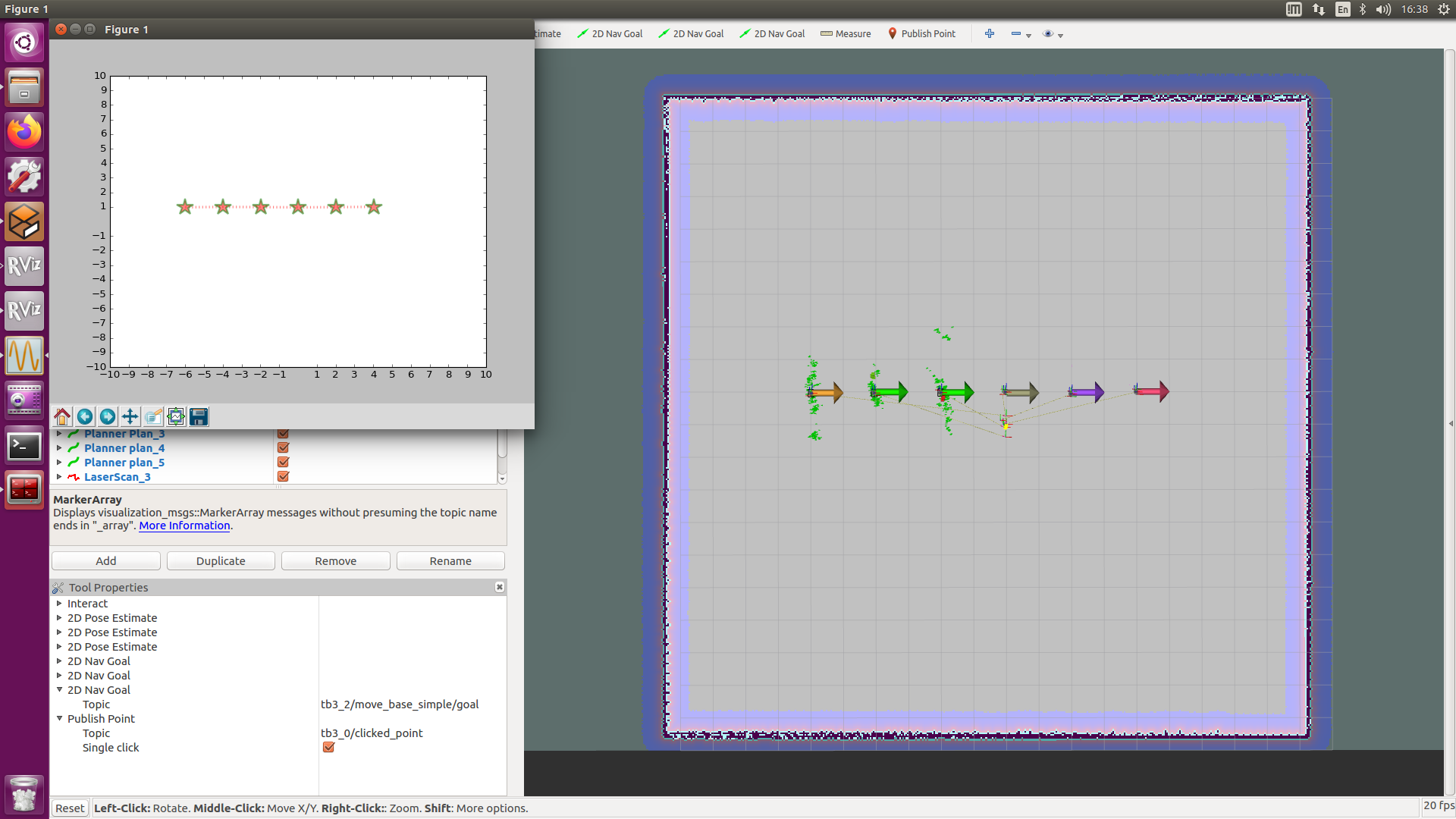
- 运行生成图形确认
./multi_scripts/multi_draw_plot.sh line- 效果如图:

- 完成绘制航点之后,可以点掉MakerArray后面的勾,再勾上,这样就清除了rviz上的航点
- 新开终端,启动导航
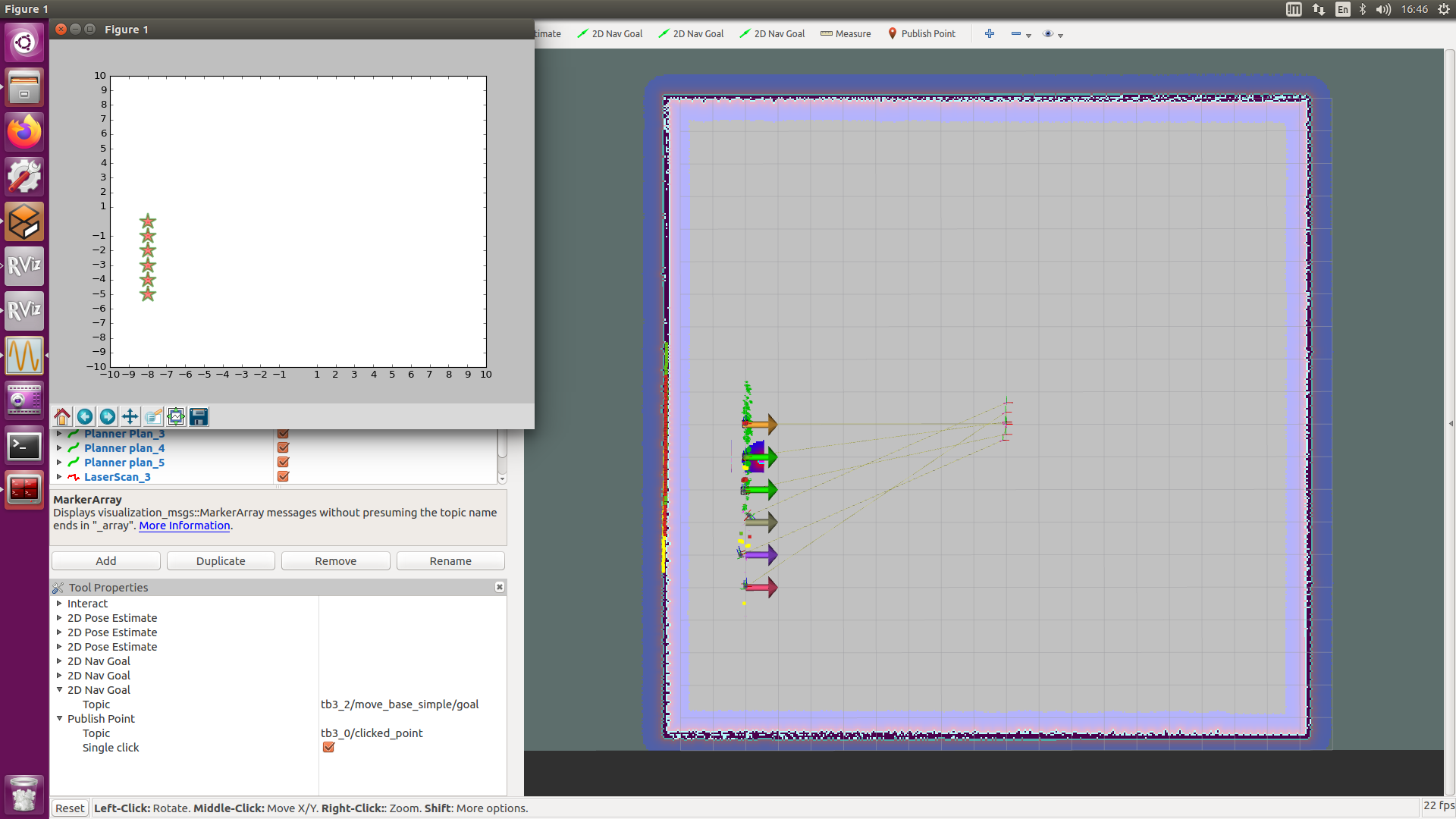
./multi_scripts/multi_draw_tour.sh line- 读取各个航点信息之后,逐一分配航点给小车,小车开始运动到指定的目标点,从而形成一条完整的线路。
- 当最后一台小车到达位置之后,弹出一个相应图形窗口。
- 效果如图:
- 新开终端,恢复原位
./multi_scripts/multi_draw_reset.sh- 效果如图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=985764576&bvid=BV1dt4y1A74o&cid=840104511&page=1&as_wide=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流