



















OpenDuckMini快速入门教程-IMU配置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何进配置IMU
相关设备
OpenDuckMini套件: 采购地址
前提准备
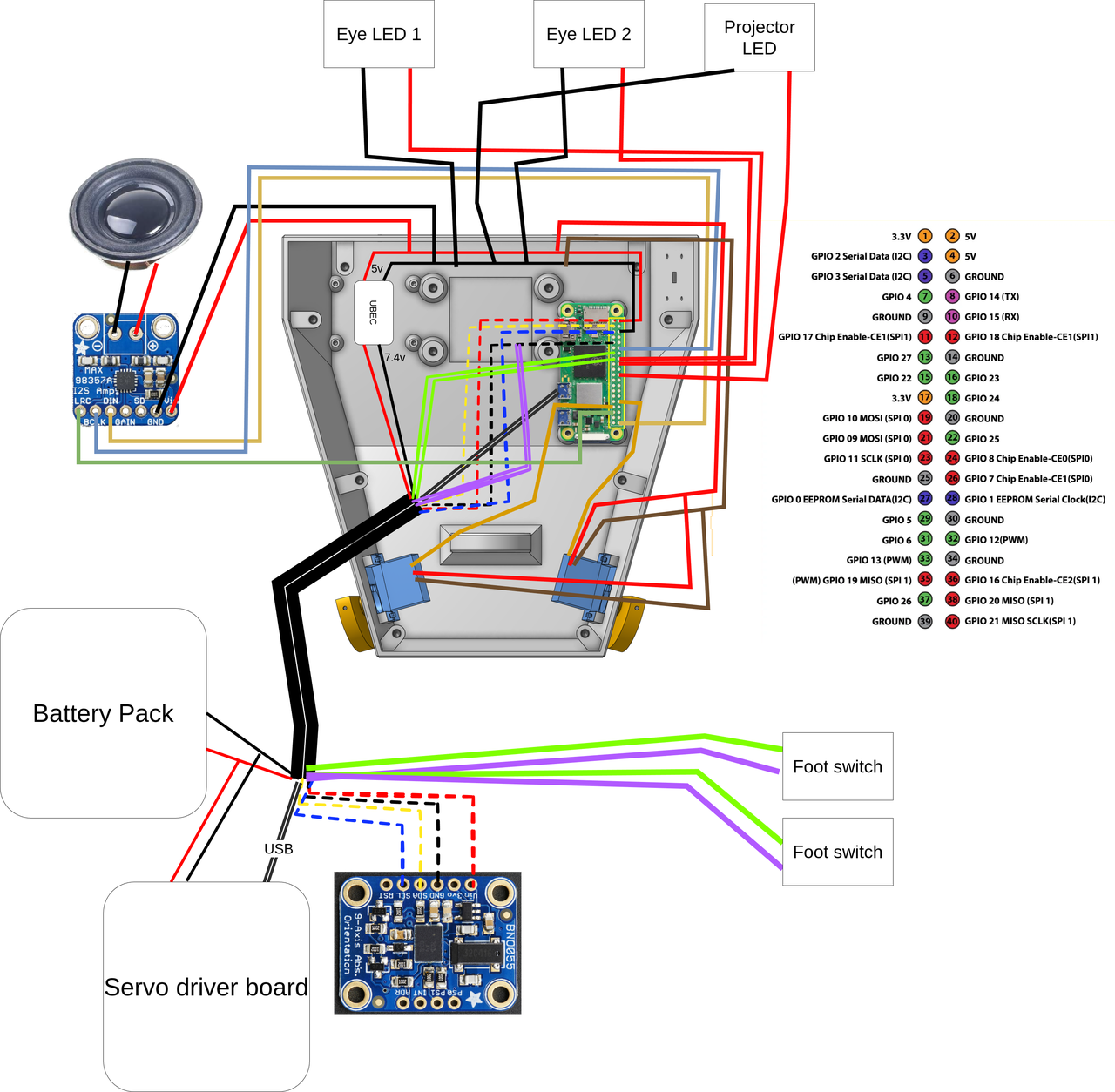
- 先确认好imu的安装位置
- BNO的字朝地面
- 其次确保连线正确
-
需要提前启动I2C接口,参考教程OpenDuckMini快速入门教程-软件安装的
启动树莓派的I2C接口部分的设置 -
检测有没有正常接入I2C接口
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- 28 -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --- 正常情况应检测到28地址,如果全为空,请检查接线或线路是否连通
- 将用户目录下的
duck_config.json文件中的imu_upside_down参数设置True,这部分设置很重要- 如果没有进行设置,
后面行走例程中一启动就会乱动找平衡
操作步骤
IMU校准
- 进行校准
$ cd ~/open_duck_mini_ws/Open_Duck_Mini_Runtime/scripts
$ python calibrate_imu.py
Calibration status: (2, 0, 0, 0)
Calibrated : False
Calibration status: (0, 0, 0, 0)
Calibrated : False
Calibration status: (0, 0, 0, 0)
Calibrated : False
Calibration status: (0, 0, 0, 0)
Calibrated : False
Calibration status: (0, 0, 0, 0)
Calibrated : False
Calibration status: (0, 0, 0, 0)
Calibrated : False
Calibration status: (2, 0, 0, 0)
Calibrated : False
Calibration status: (2, 0, 0, 0)
Calibrated : False
Calibration status: (2, 3, 0, 0)
Calibrated : False
Calibration status: (2, 3, 0, 0)
Calibrated : False
...
Calibration status: (3, 3, 1, 3)
Calibrated : False
Calibration status: (3, 3, 1, 3)
Calibrated : False
Calibration status: (3, 3, 1, 3)
Calibrated : False
Calibration status: (3, 3, 3, 3)
Calibrated : True
CALIBRATION DONE
offsets_accelerometer (-166, -71, -32)
offsets_gyroscope (1, -2, 0)
offsets_magnetometer (-1132, 765, 38)
Saved imu_calib_data.pkl- 将整个机器人换不同发现翻转移动,使终端输出的数字都变为[3,3,3,3],
Calibrated的值为True - 同时会将校准结果保存在
imu_calib_data.pkl文件中 - 保存一份到
mini_bdx_runtime文件夹里
$ cp imu_calib_data.pkl ~/open_duck_mini_ws/Open_Duck_Mini_Runtime/mini_bdx_runtime/mini_bdx_runtime/IMU测试
- 运行测试脚本
$ cd ~/open_duck_mini_ws/Open_Duck_Mini_Runtime/mini_bdx_runtime/mini_bdx_runtime
$ python raw_imu.py
gyro [0 0 0]
accelero [0 0 0]
---
gyro [0.14 0.001 0.002]
accelero [ 0.93 0. -9.79]
---
gyro [0.14 0.002 0.001]
accelero [ 2.19 0. -9.77]演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=114771441550405&bvid=BV1D2gkz7EtP&cid=30774199023&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流