



















OpenDuckMini快速入门教程-硬件介绍
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍OpenDuckMini的硬件组成
注意:本教程使用的硬件与官方版本的略有不同,请注意区别
相关设备
OpenDuckMini套件: 采购地址
硬件组成
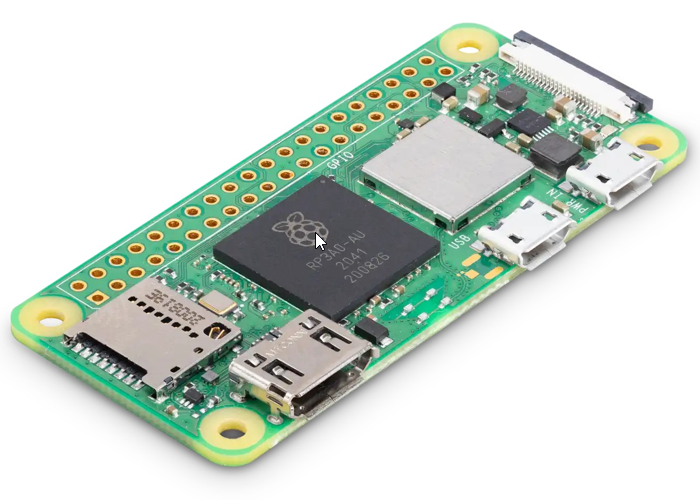
- 1 x 树莓派zero2w
- 1 x 16G内存卡
- 1 x 树莓派摄像头
- 1 x 树莓派zero专用摄像头排线
- 1 x ps4手柄
- 14 x 飞特舵机ST3215-C018(12V版本)
- 1 x BNO055陀螺仪
- 1 x 舵机驱动板
- 1 x ubec降压模块
- 1 x 1500毫安时3s航模电池
- 1 x 低压报警器
- 1 x B3充电器
- 2 x 舵机SG90
- 1 x 锅底喇叭
- 1 x MAX98357-I2S音频放大器模块
- 2 x 30mm透明圆片
- 2 x LED仿流明灯珠
- 3 x 6804轴承
- 4 x 微动开关SS-10
- 1 x typec转microusb公头50cm数据线
- 螺丝若干(M3x4x5热熔镶嵌件、M3x10圆头螺丝、M3x6圆头螺丝、M2x6自攻螺丝、M2x8自攻螺丝)
- 自制线缆若干
主要硬件
- 树莓派zero2w
- 飞特舵机ST3215-C018(12V版本)

3D打印件
- foot_top.stl x2
- foot_side.stl x2
- foot_bottom_pla.stl x2
- foot_bottom_tpu.stl x2 (TPU)
- knee_to_ankle_left_sheet.stl x4
- knee_to_ankle_right_sheet.stl x4
- leg_spacer.stl x4
- left_roll_to_pitch.stl x1
- right_roll_to_pitch.stl x1
- roll_motor_bottom.stl x2
- roll_motor_top.stl x2
- trunk_bottom.stl x1
- trunk_top.stl x1
- neck_left_sheet.stl x1
- neck_right_sheet.stl x1
- head_pitch_to_yaw.stl x1
- head_yaw_to_roll.stl x1
- head_roll_mount.stl x1
- head.stl x1
- head_bot_sheet.stl x1
- left_antenna_holder.stl x1
- right_antenna_holder.stl x1
- left_cache.stl x1
- right_cache.stl x1
- body_front.stl x1
- body_middle_bottom.stl x1
- body_middle_top.stl x1
- body_back.stl x1
- battery_pack_lid.stl x1
- bulb.stl x1
- flash_light_module.stl x1
- flash_reflector_interface.stl x1
- left_eye.stl x1
- right_eye.stl x1
- speaker_interface.stl x1
- speaker_stand.stl x1
参考资料
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流