



















OpenDuckMini快速入门教程-硬件组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何组装鸭子的打印件
相关设备
OpenDuckMini套件: 采购地址
前提准备
- foot_top.stl x2
- foot_side.stl x2
- foot_bottom_pla.stl x2
- foot_bottom_tpu.stl x2 (TPU)
- knee_to_ankle_left_sheet.stl x4
- knee_to_ankle_right_sheet.stl x4
- leg_spacer.stl x4
- left_roll_to_pitch.stl x1
- right_roll_to_pitch.stl x1
- roll_motor_bottom.stl x2
- roll_motor_top.stl x2
- trunk_bottom.stl x1
- trunk_top.stl x1
- neck_left_sheet.stl x1
- neck_right_sheet.stl x1
- head_pitch_to_yaw.stl x1
- head_yaw_to_roll.stl x1
- head_roll_mount.stl x1
- head.stl x1
- head_bot_sheet.stl x1
- left_antenna_holder.stl x1
- right_antenna_holder.stl x1
- left_cache.stl x1
- right_cache.stl x1
- body_front.stl x1
- body_middle_bottom.stl x1
- body_middle_top.stl x1
- body_back.stl x1
- battery_pack_lid.stl x1
- bulb.stl x1
- flash_light_module.stl x1
- flash_reflector_interface.stl x1
- left_eye.stl x1
- right_eye.stl x1
- speaker_interface.stl x1
- speaker_stand.stl x1注意:
- 所有零件均用标准PLA/PETG材料进行打印,填充率为15%
- 但
foot_bottom_tpu.stl除外,其需要用TPU材料进行打印,填充率为40%flash_light_module和flash_reflector_interface可以不安装,这个也只是在头的侧边多安装一个LED灯而已
- OpenDuckMini完整模型已开源在
Onshape上 | Onshape链接 - 若组装遇到模糊不定的地方,可以到Onshape上查看完整的CAD模型
- 基本舵机位置图

- 舵机的连线大概示意图
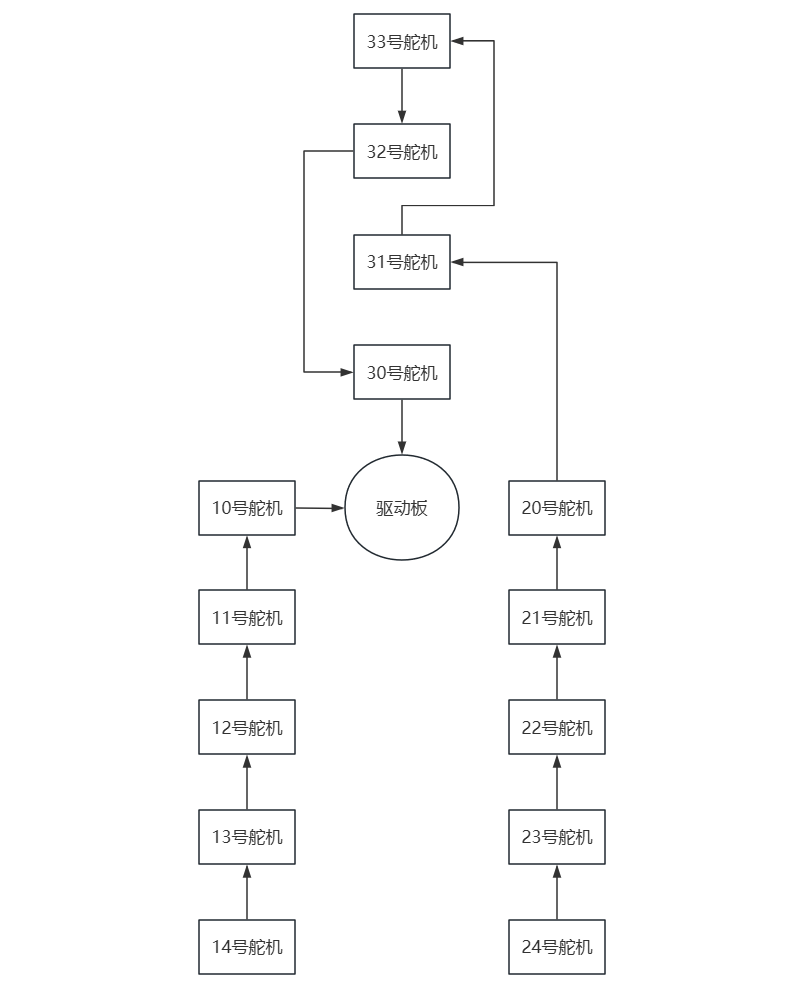
- 默认情况下,固定舵机通常使用舵机自带的
圆头十字自攻M2*6螺丝和圆头十字M3*6螺丝,下面就不过多描述舵机的固定方式 - 由于
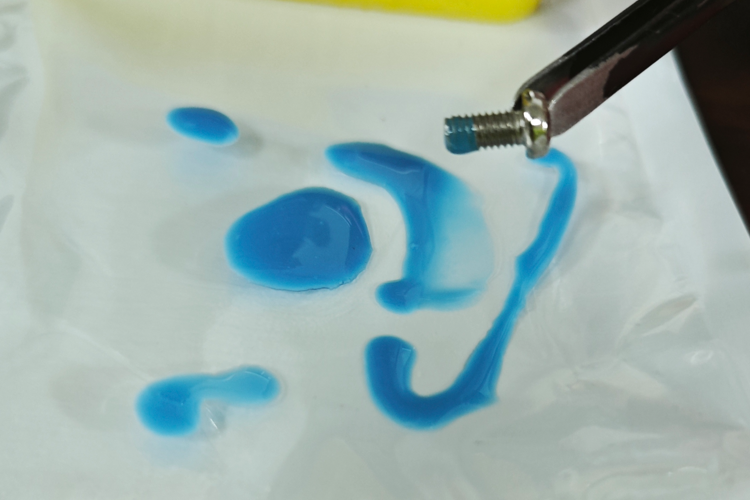
舵盘位置的螺丝容易松动,固定舵盘时最好加上螺纹锁固剂

操作步骤
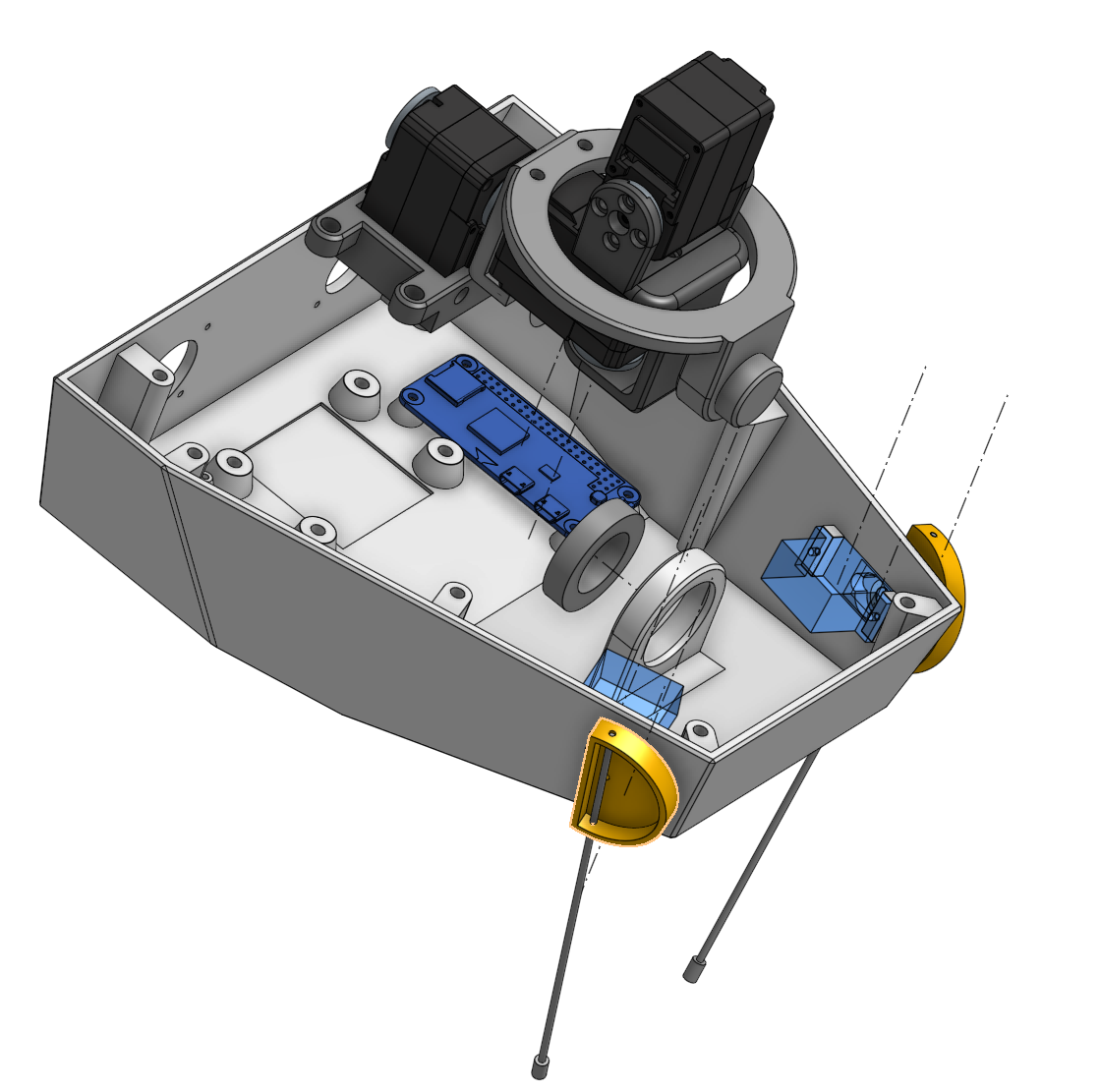
组装躯干
trunk_bottom打印件需要在顶部安装两个热熔镶嵌件,底部则需要安装4个- 同时将两个
6804轴承安装到图中白色圆环位置中
- 如下图,用
圆头十字M3*10螺丝穿过红圈位置将trunk_bottom和trunk_top组装起来
- 使用舵机自带的
圆头十字自攻M2*6螺丝从两侧固定neck_pitch[ID: 30]舵机到trunk_top部件上
- 将
roll_motor_bottom部件插入到trunk_bottom部件上的6804轴承中
- 实际组装参考图

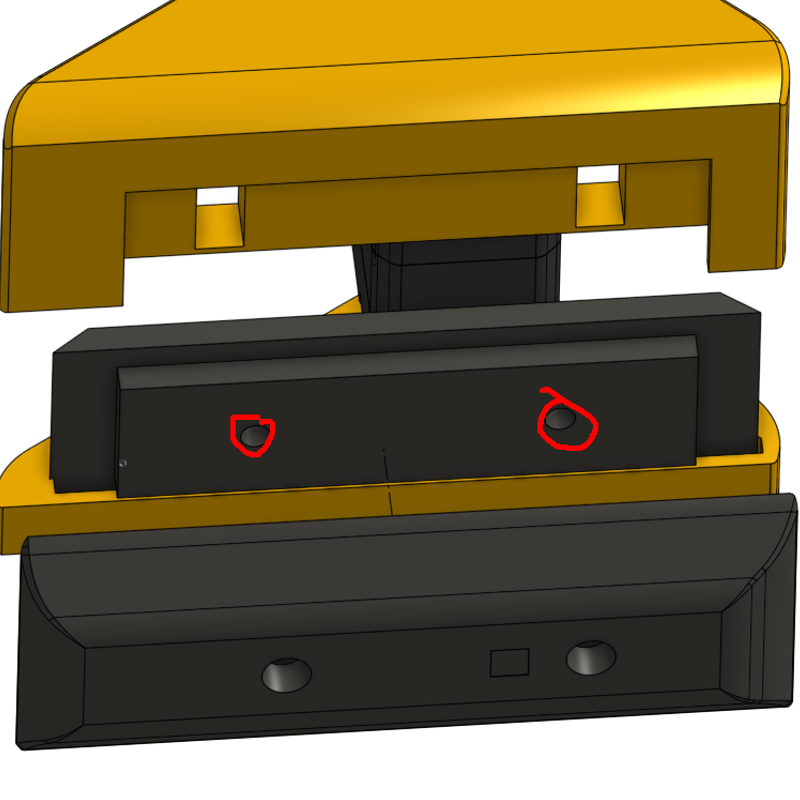
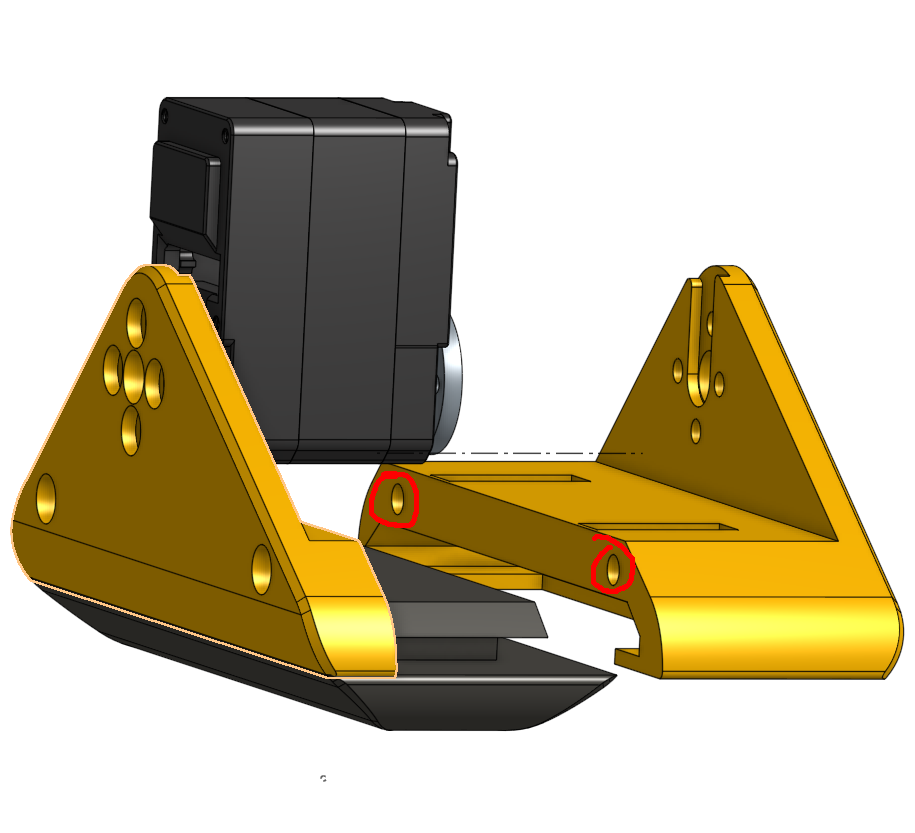
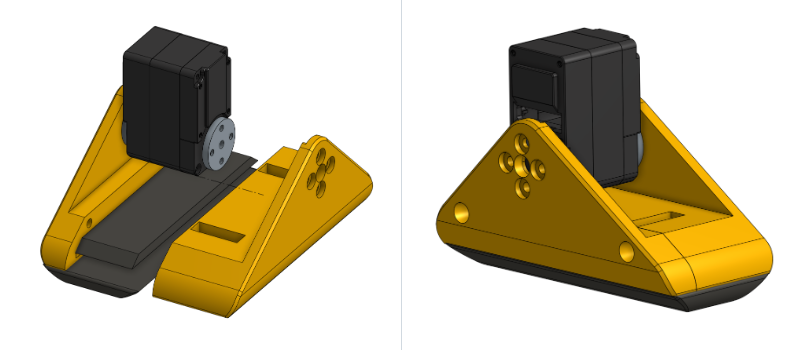
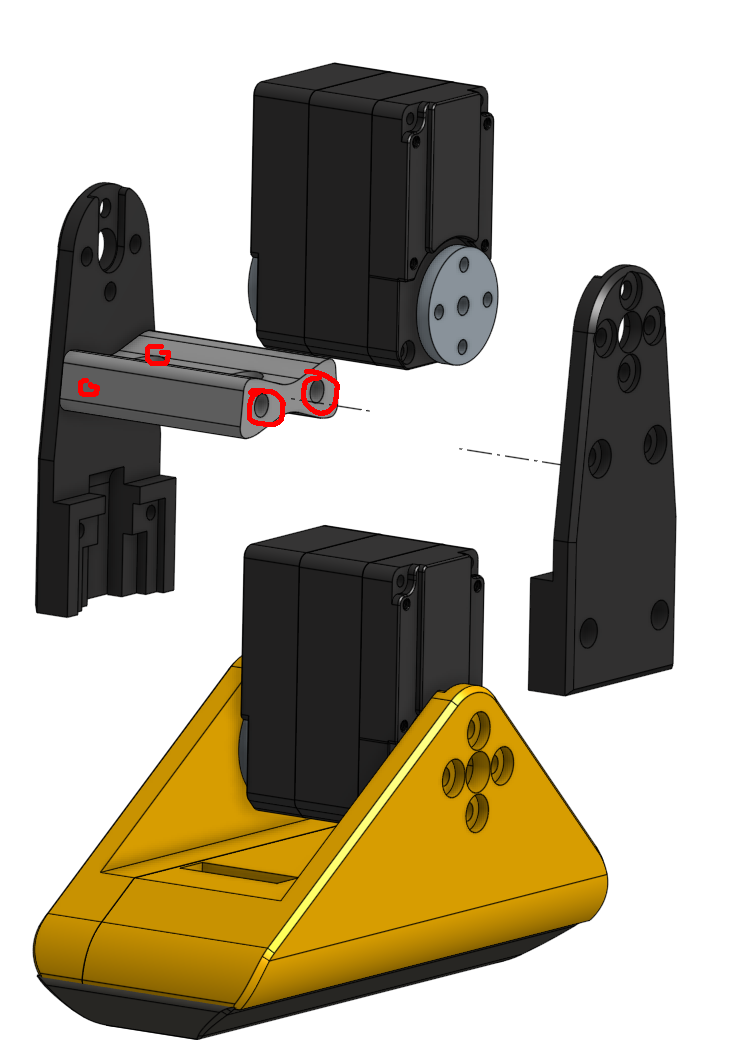
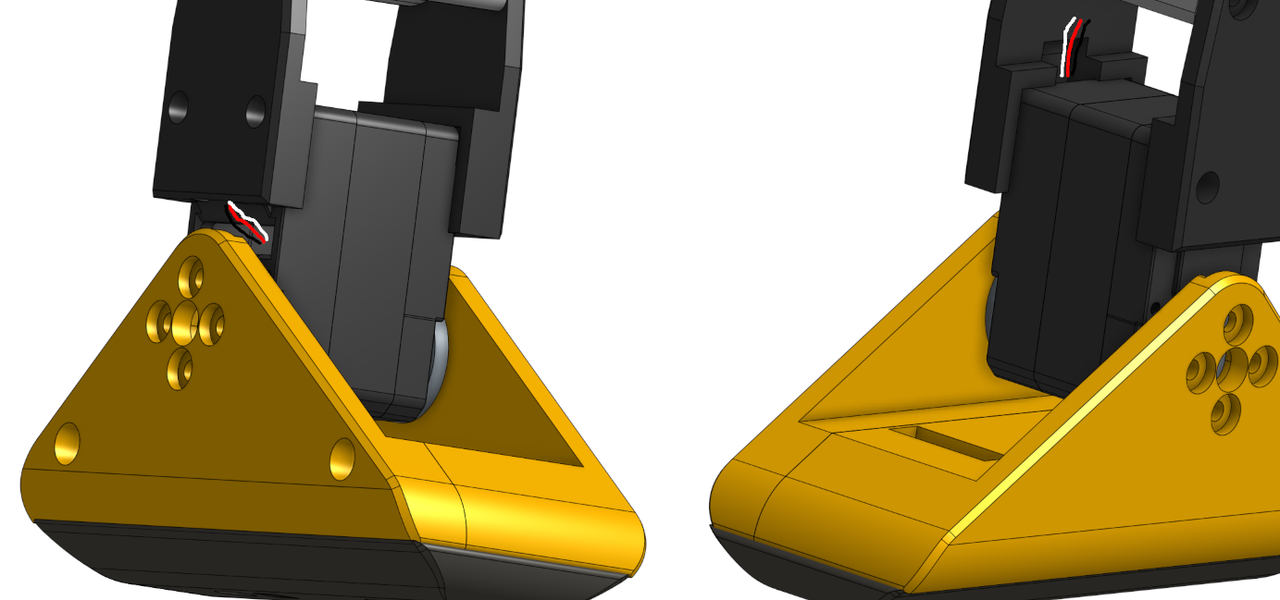
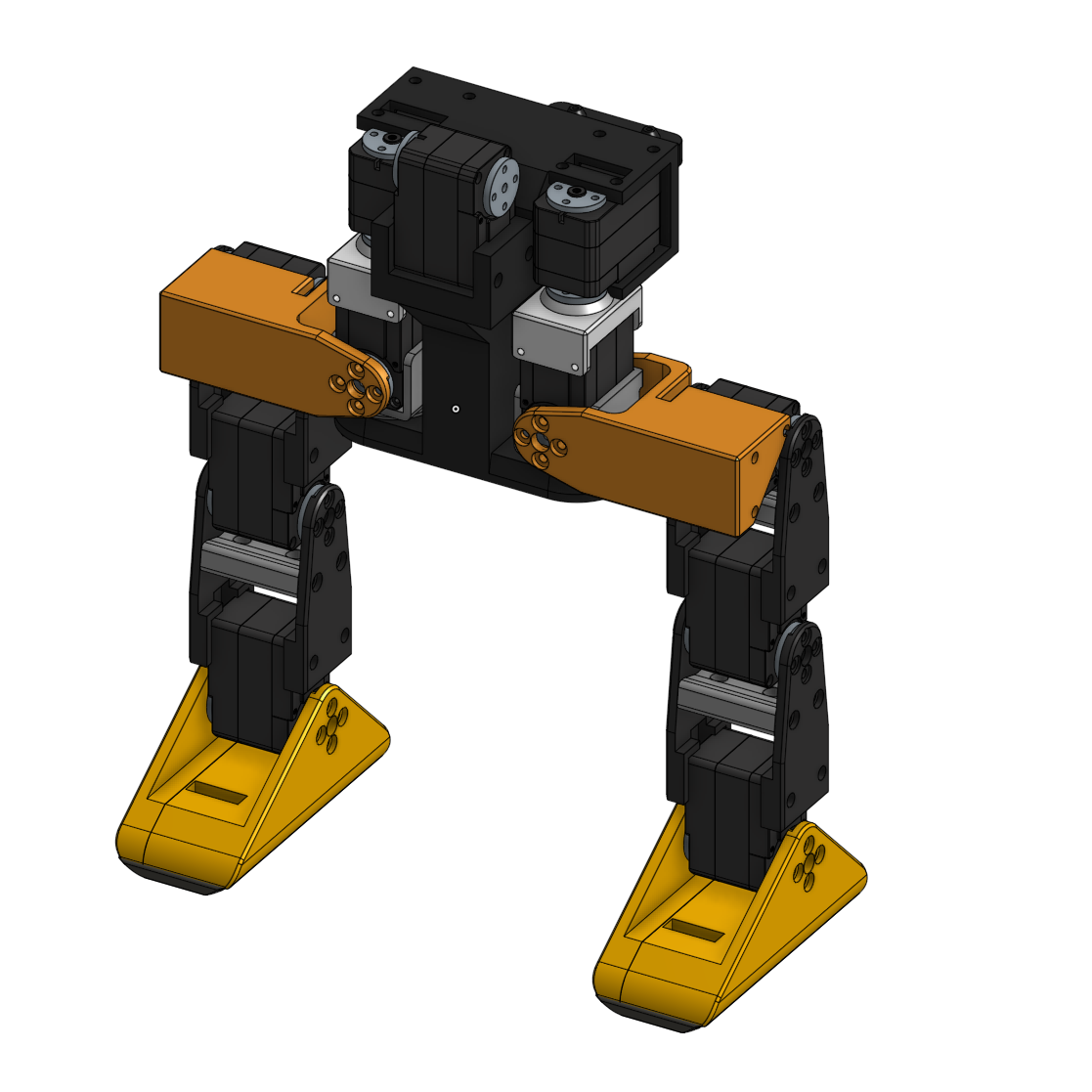
组装脚部
- 左脚和右脚的安装方式都是一致的
- 安装好脚部微动开关,以免后面再重复拆卸
注意:
foot_bottom_pla打印件和foot_bottom_tpu打印件安装后有空隙是正常的,此是方便脚部微动开关能够更好地工作
foot_bottom_pla打印件需要预先在红圈位置安装好热熔镶嵌螺母- 如图将
foot_bottom_pla打印件和foot_bottom_tpu打印件使用圆头十字M3*6螺丝固定起来
foot_top部件需要预先在红圈位置安装好热熔镶嵌螺母- 如图将
foot_top打印件和foot_side打印件使用圆头十字M3*10螺丝固定起来
- 如图安装
left_ankle[ID: 24]舵机和right_ankle[ID: 14]舵机到foot_top打印件和foot_side打印件中间 - 注意舵机的驱动侧应朝向
foot_top打印件的一侧
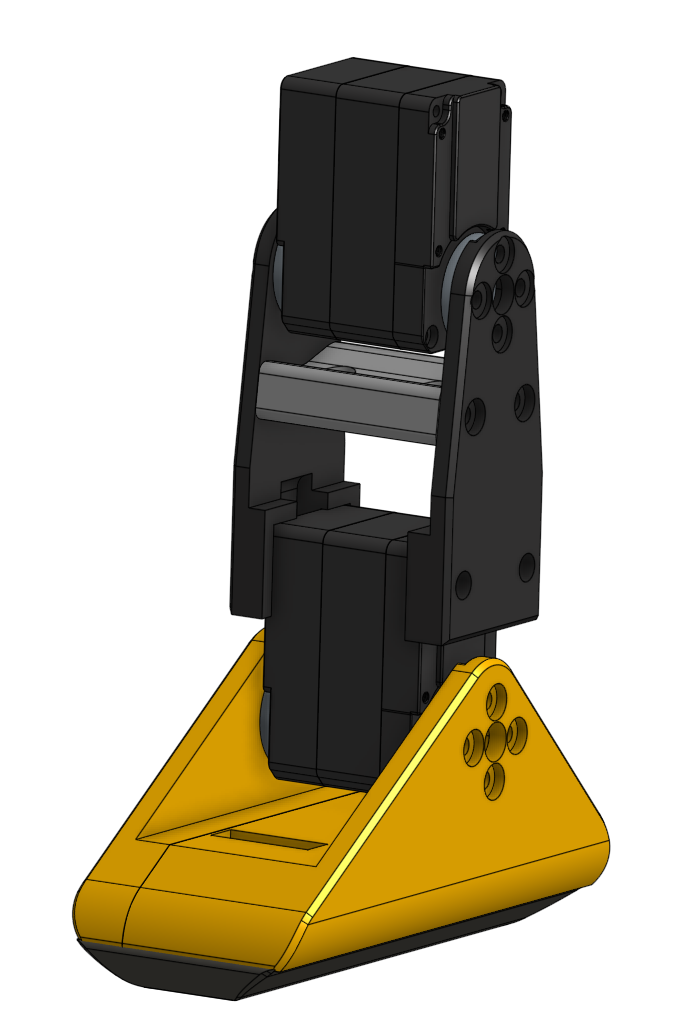
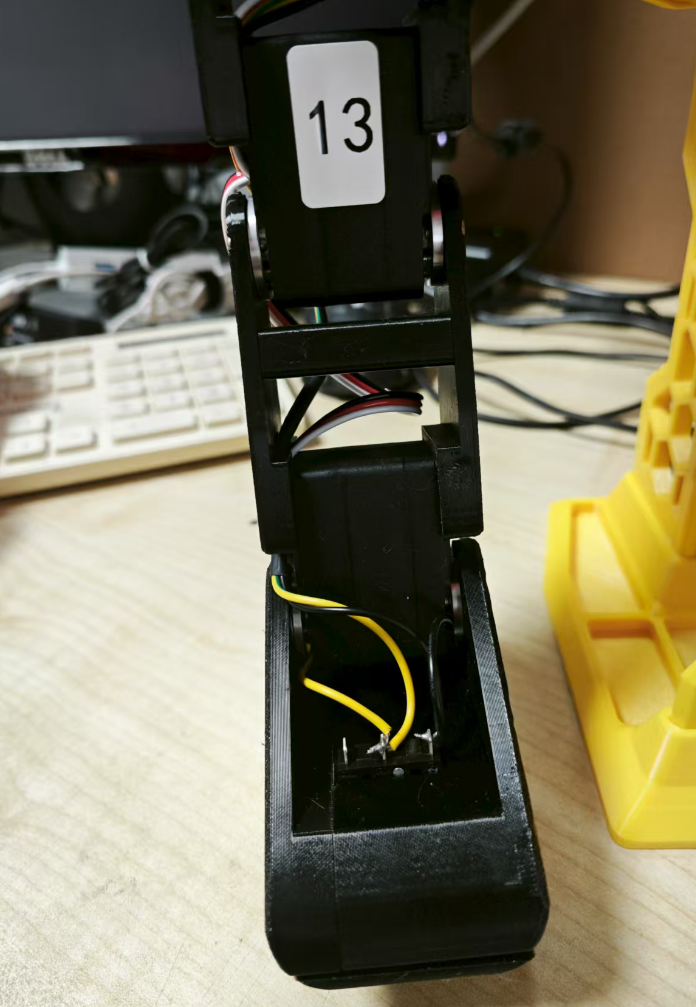
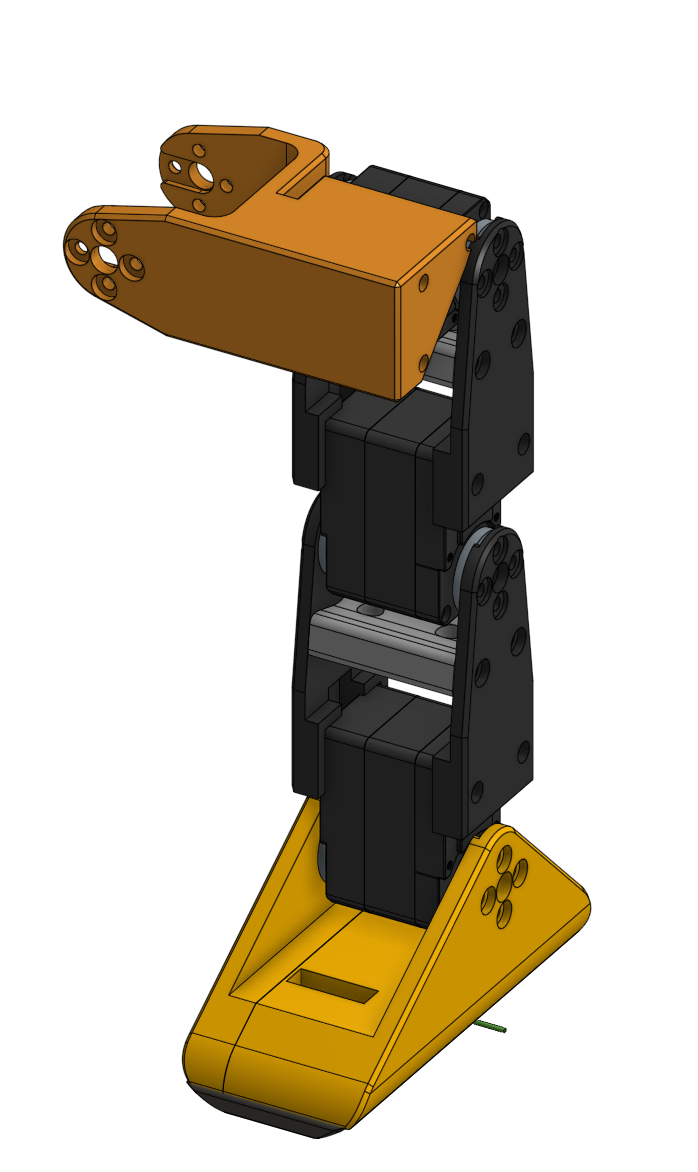
组装小腿
- 左小腿和右小腿的安装方式都是一致的
leg_spacer打印件需要预先在红圈位置安装好4个热熔镶嵌螺母
- 将舵机的线缆从
knee_to_ankle_right_sheet打印件leg_spacer打印件和预留的孔穿过
- 如图,使用
圆头十字M3*6螺丝将knee_to_ankle_left_sheet打印件和knee_to_ankle_right_sheet打印件和leg_spacer打印件固定起来,同时固定好对应的舵机
- 实际组装参考图
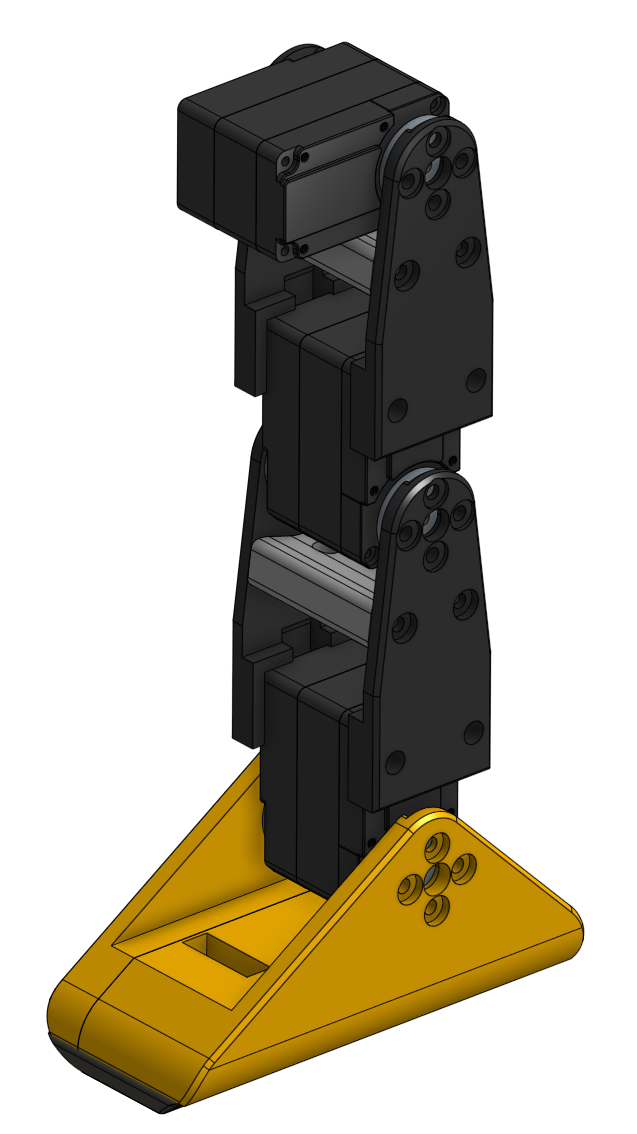
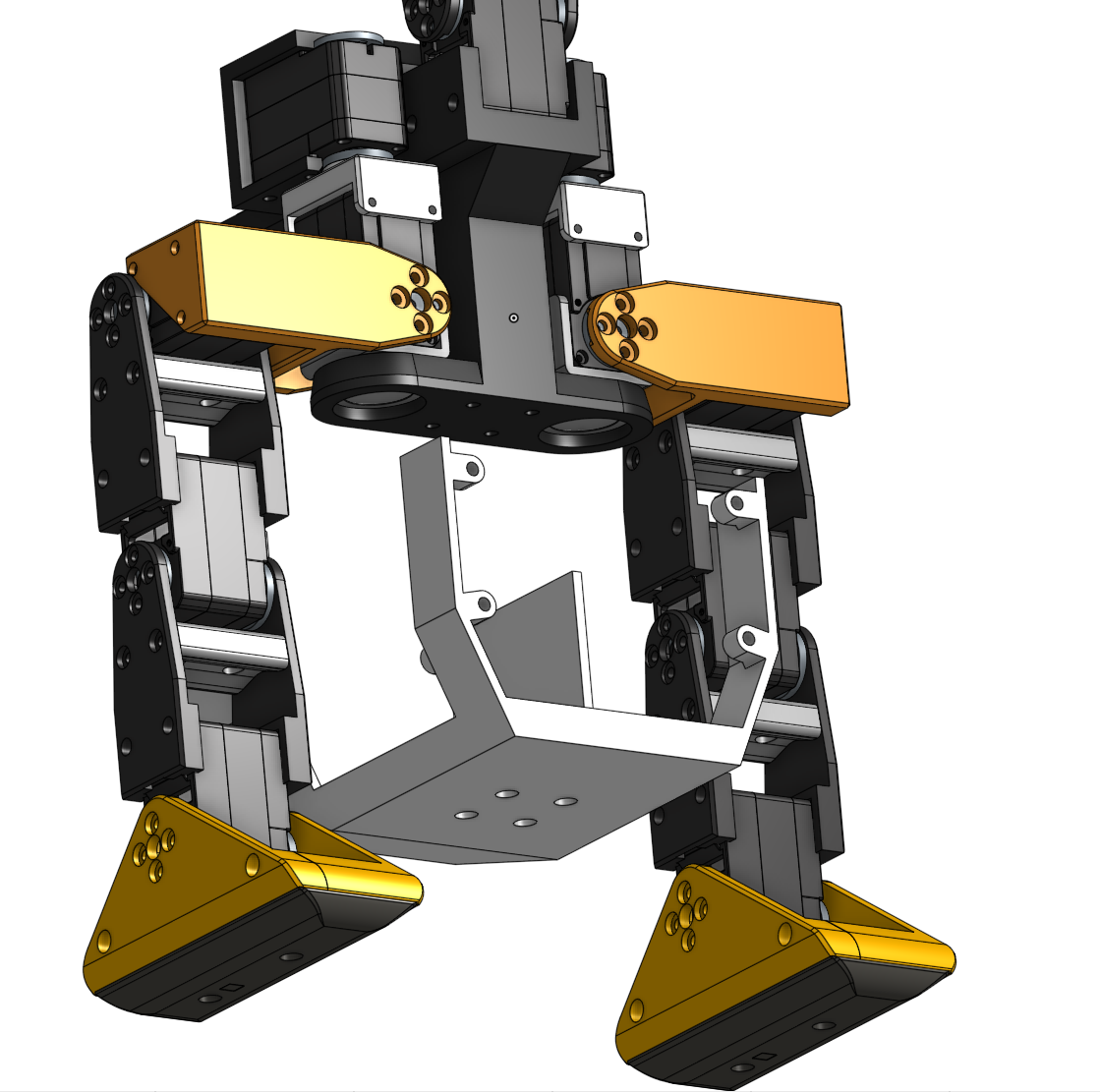
组装大腿
-
大腿的组装基本与小腿一致,除了
hip_pitch舵机部分是横向装 -
同时说明一下
left_hip_pitch[ID: 22]舵机和right_hip_pitch[ID: 12]舵机是对称安装的 -
左腿
- 右腿
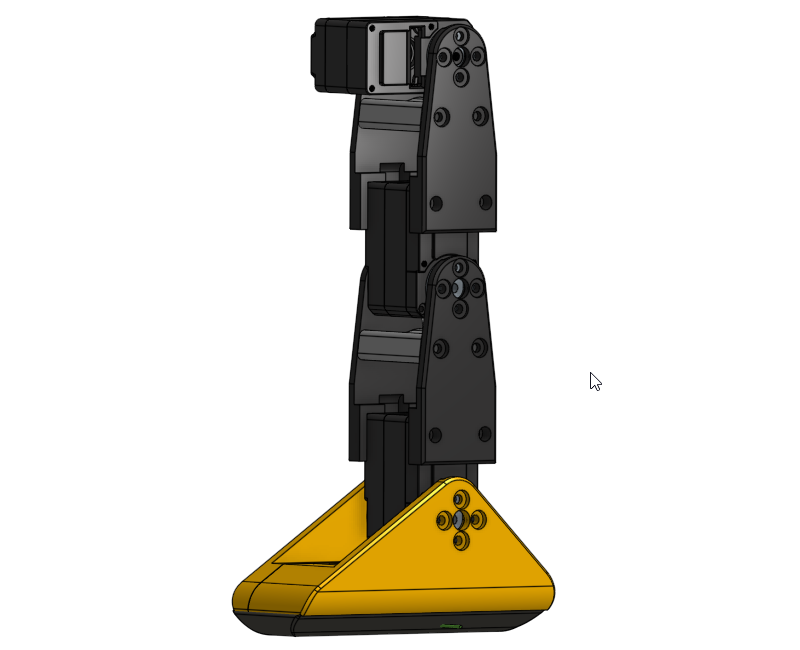
- 实际组装参考图


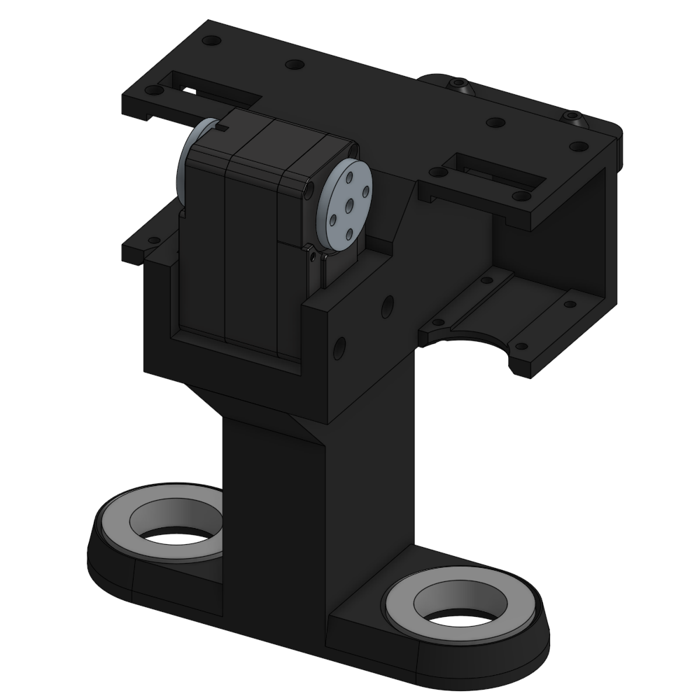
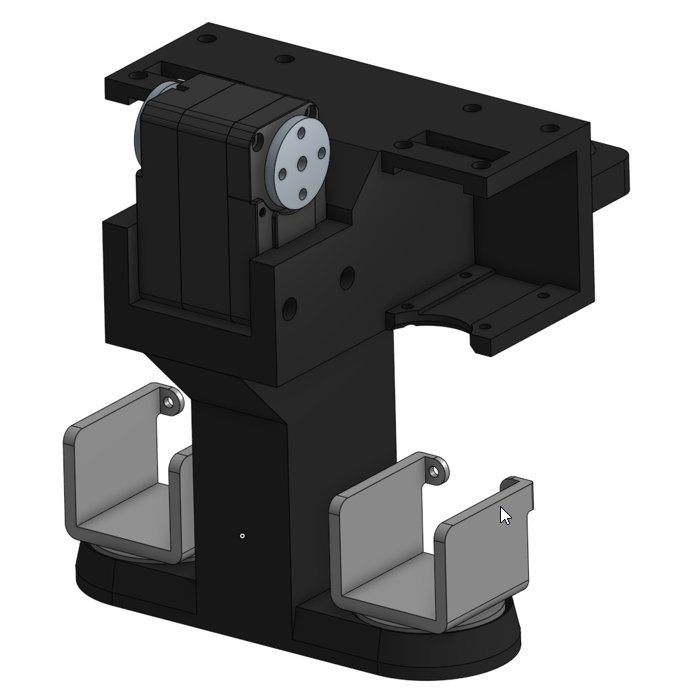
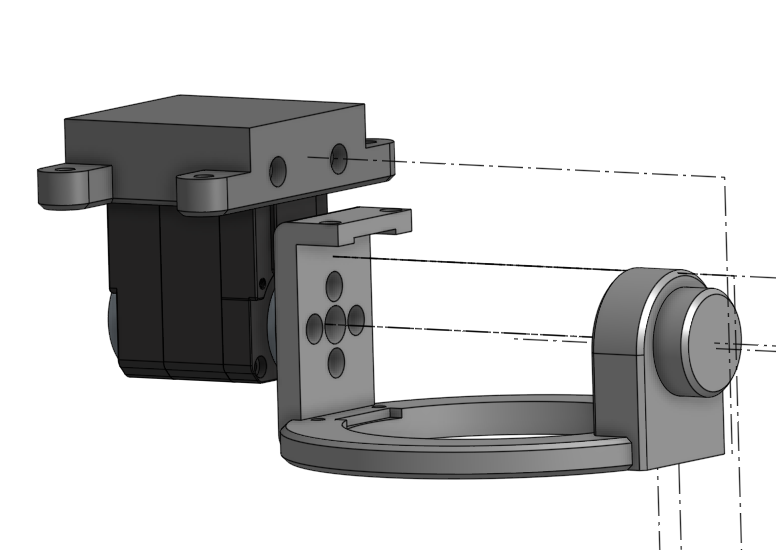
组装臀部
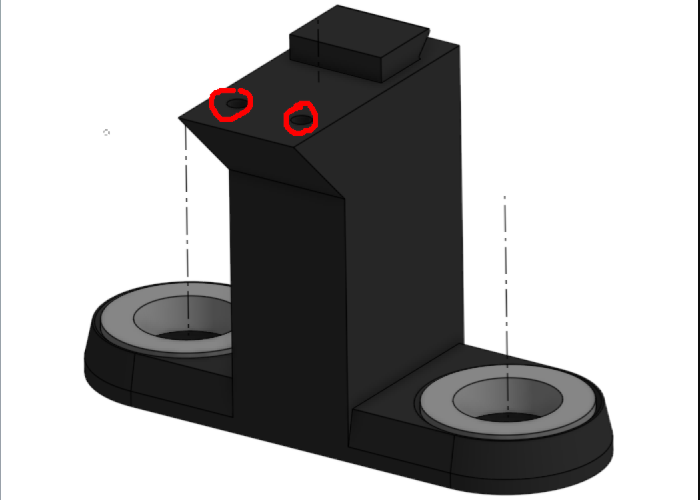
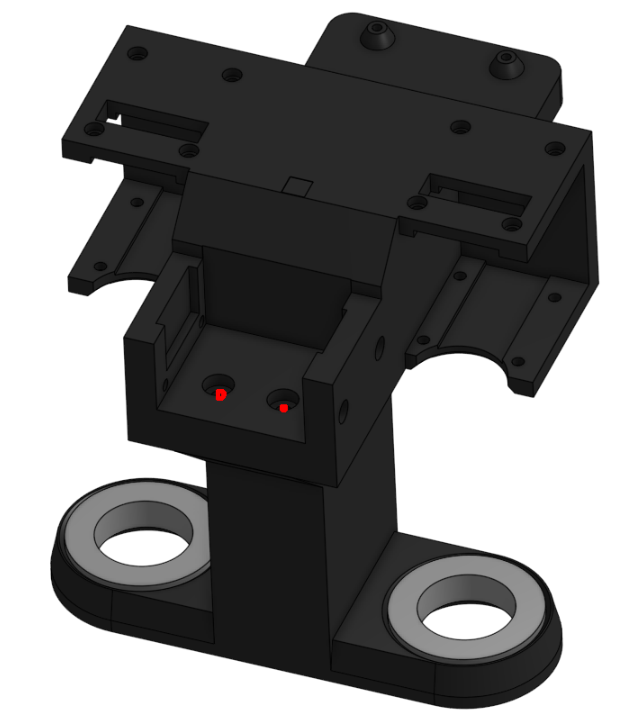
left_roll_to_pitch打印件和right_roll_to_pitch打印件是对称的,需要注意安装位置
注意:此部分安装时需要提前接上线缆,不然固定好舵机后就很难接线了
- 将
roll_motor_top打印件安装到left_hip_yaw[ID: 20]舵机上(从底部拧螺丝),然后再固定left_hip_roll[ID: 21]舵机到roll_motor_top打印件,最后再装到躯干上(不要遗忘用螺丝固定舵机) - 这步骤左右腿一样,注意舵机ID,不要装乱
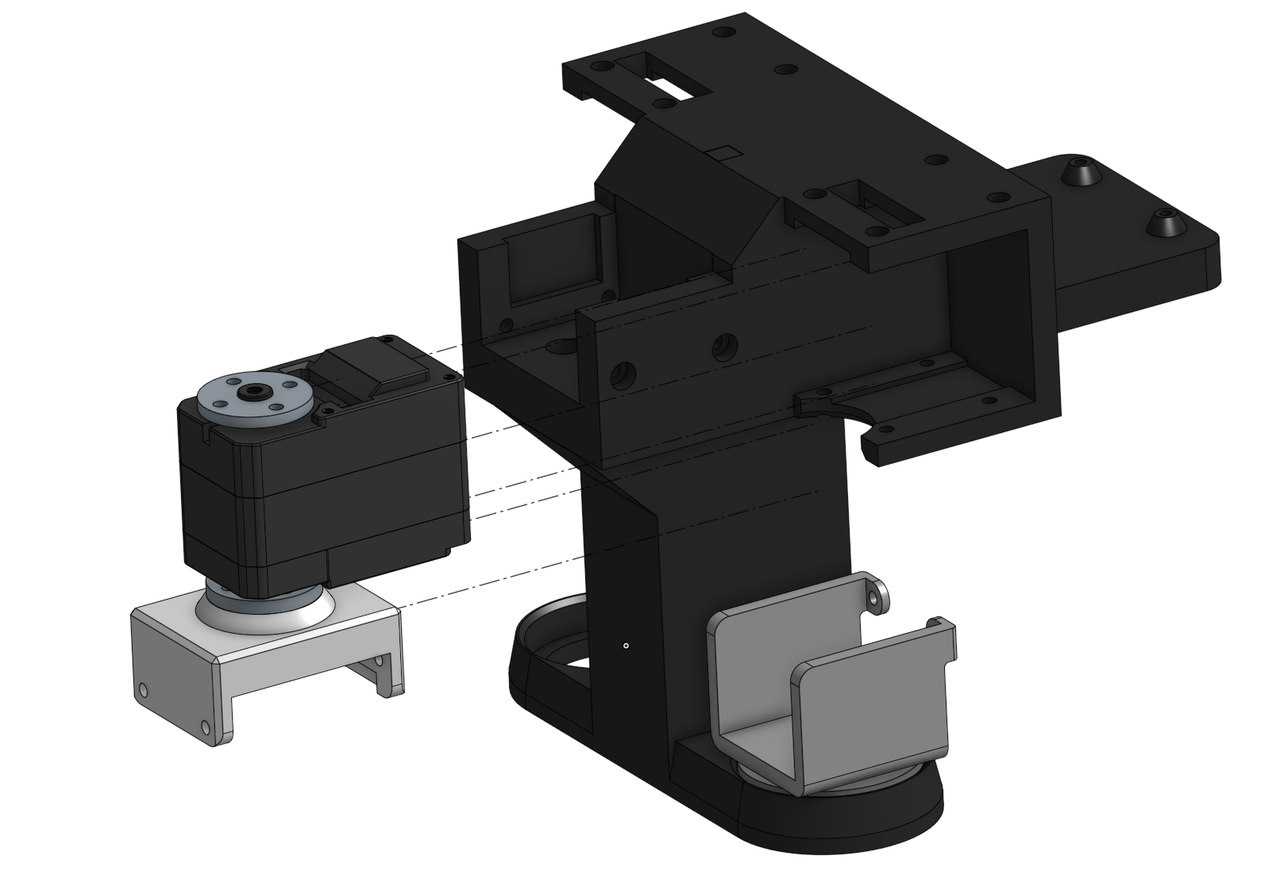
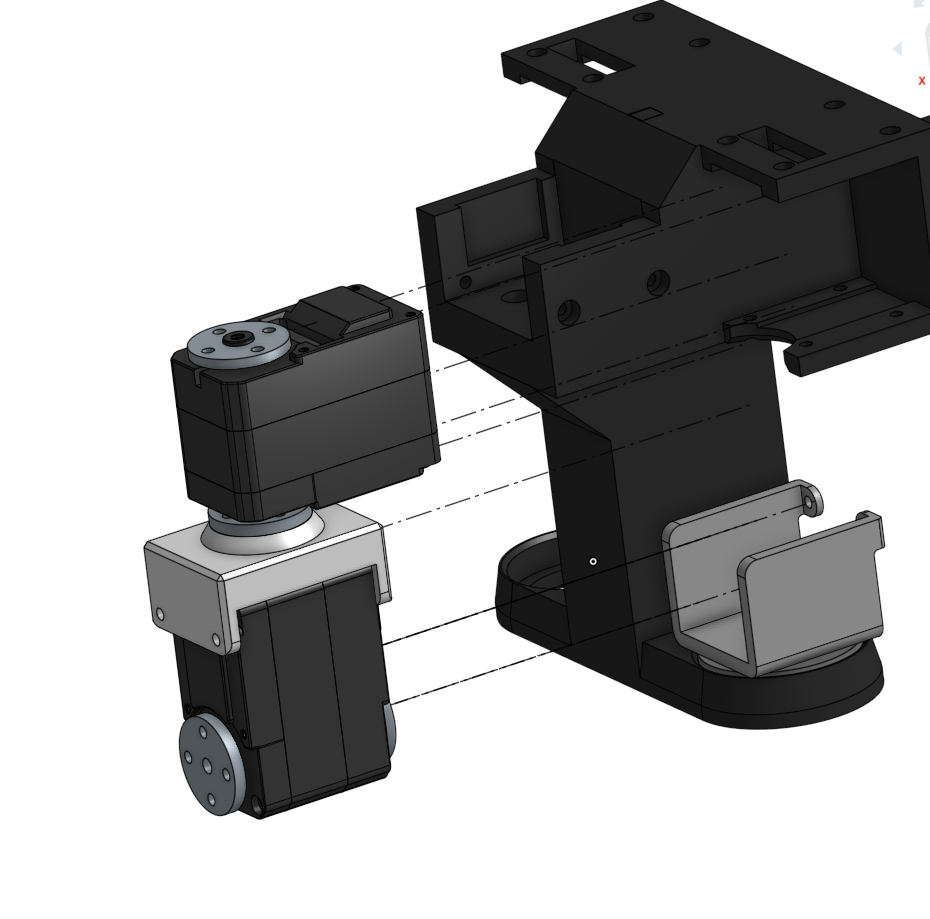
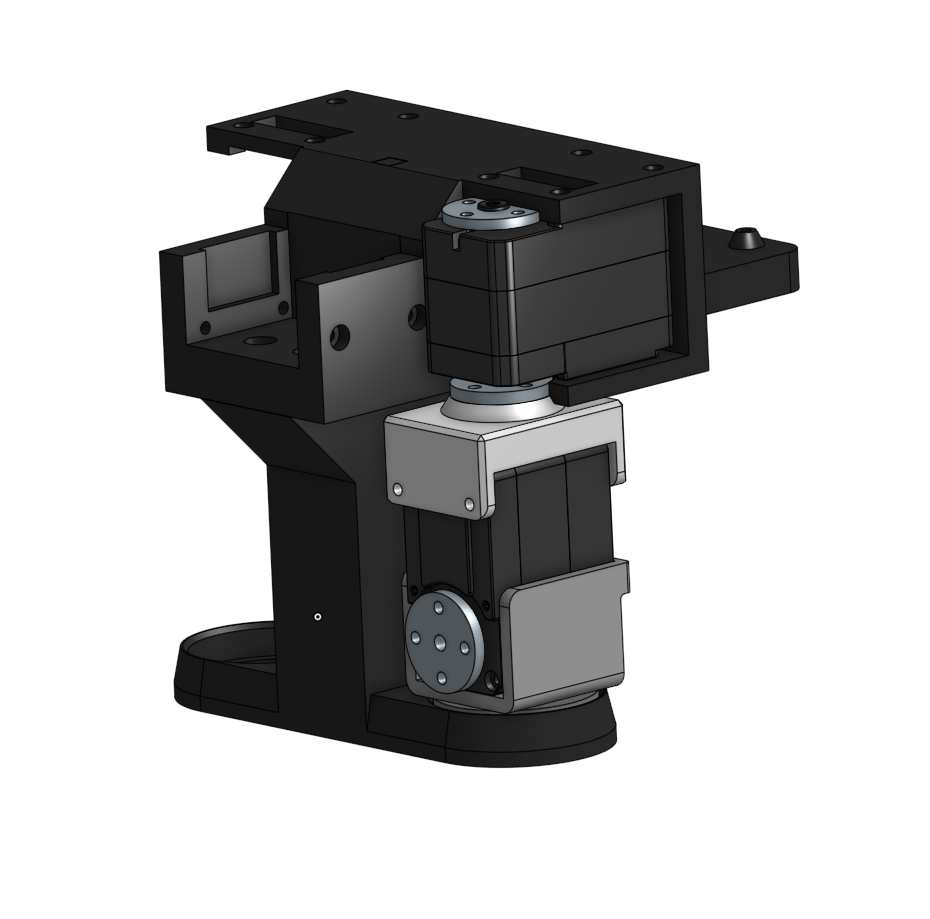
- 将腿组装到躯干上
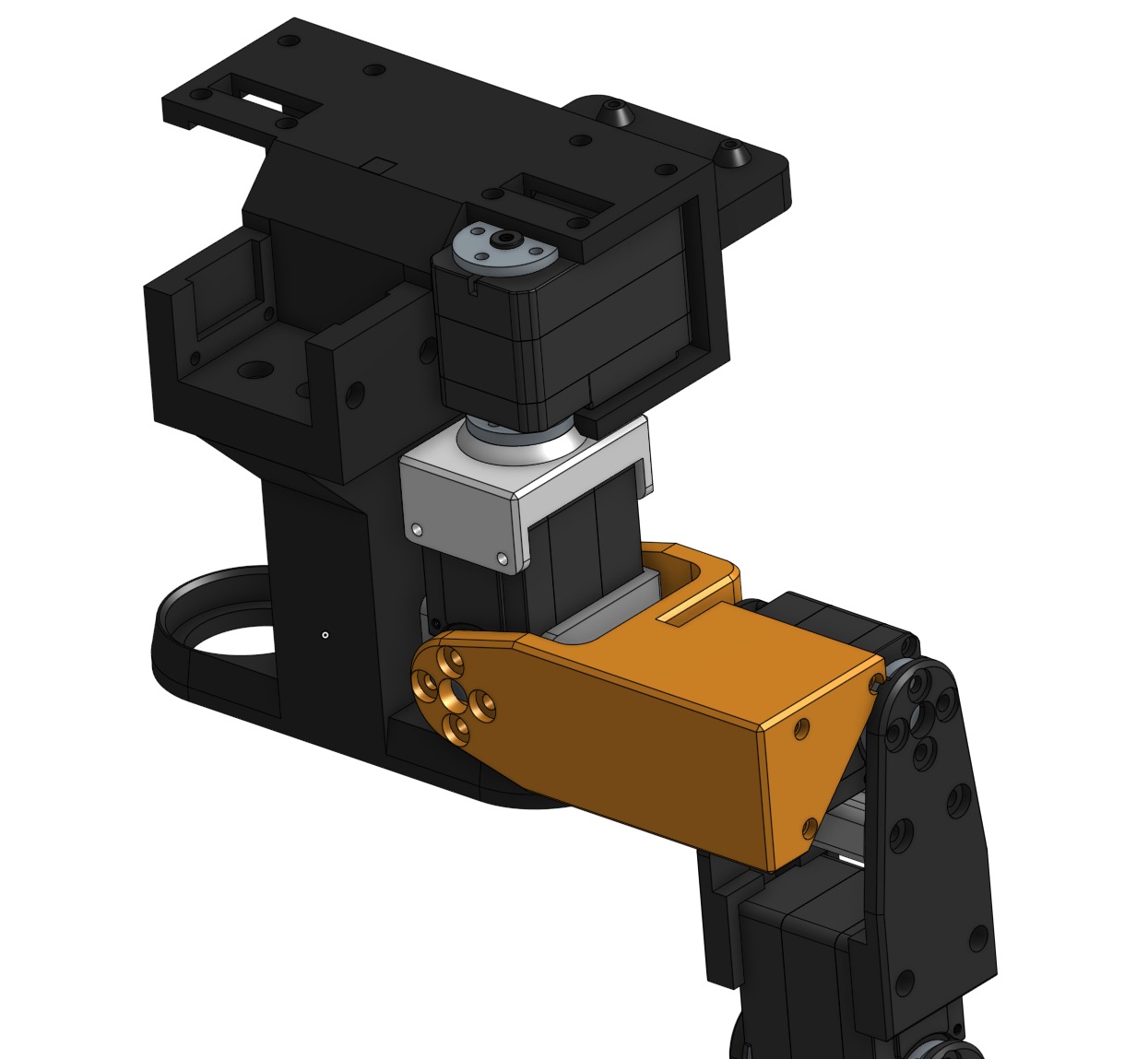
- 同样的步骤组装好右边部分
- 实际组装参考图

组装颈部
- 如图,使用
neck_right_sheet和neck_left_sheet安装固定neck_pitch[ID:31]舵机
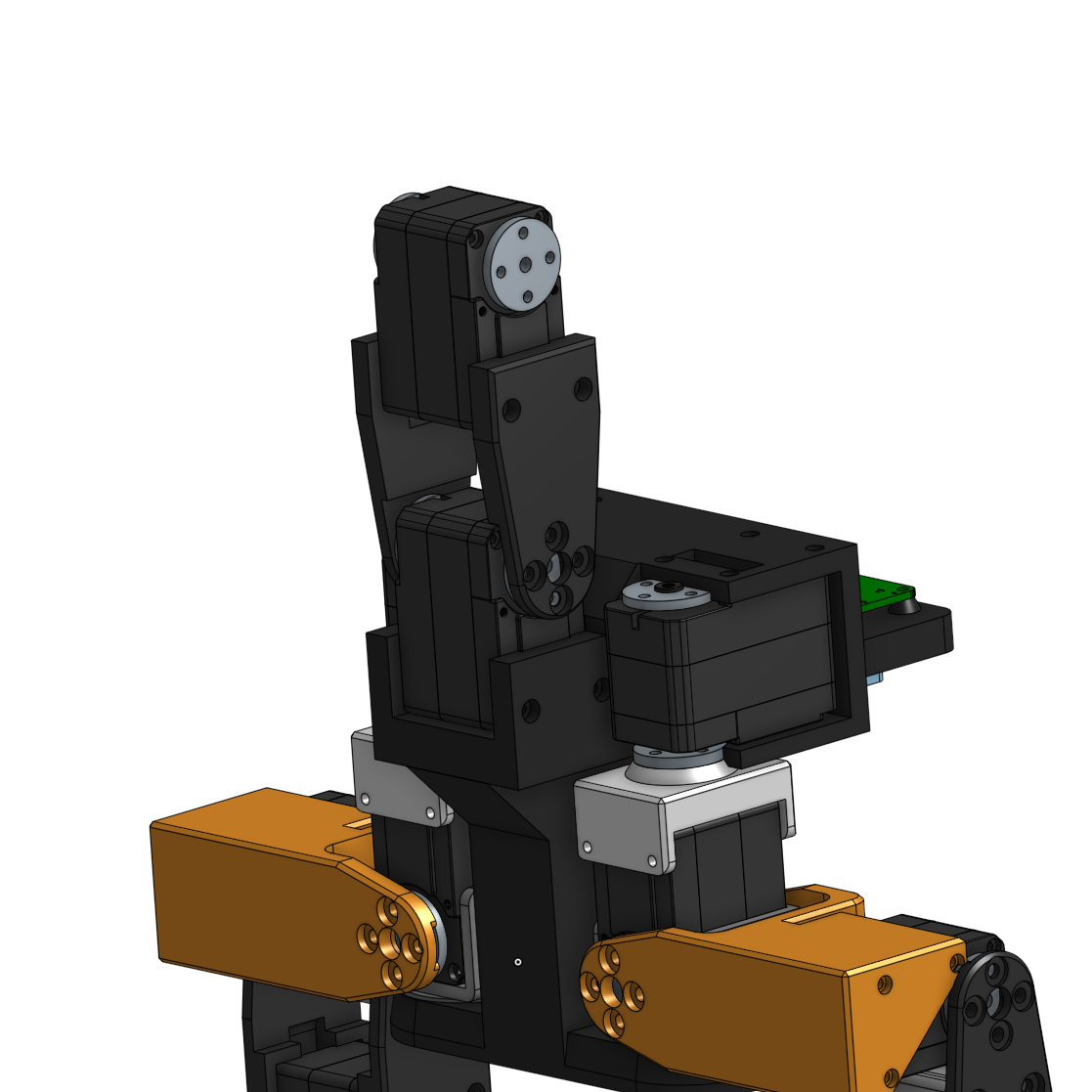
组装头部组件
- 如图,固定
head_pitch_to_yaw打印件和head_yaw[ID:32]舵机
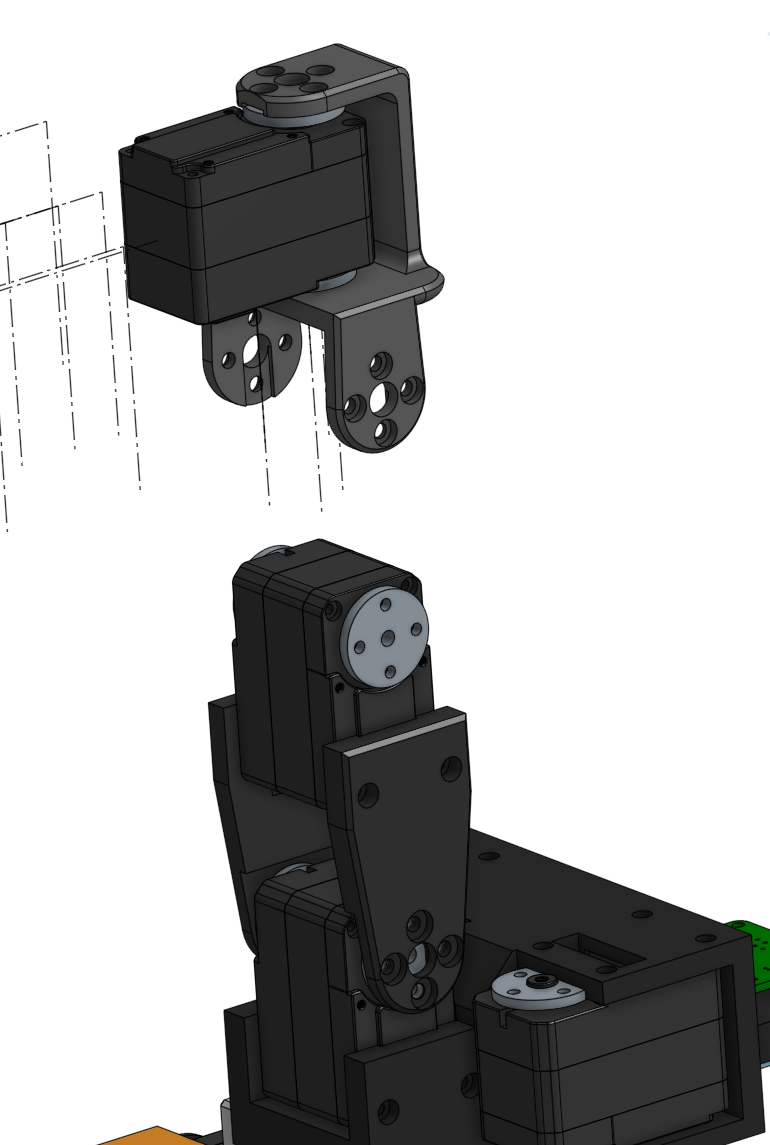
- 如图,然后独立安装
head_yaw_to_roll打印件和head_roll_mount打印件到head_roll[ID:33]舵机上
注意:此时可以提前套入head_bot_plate打印件和body_middle_top打印件到颈部位置,以免后面也重复拆卸这颈部位置
- 如图,固定颈部和头部组件
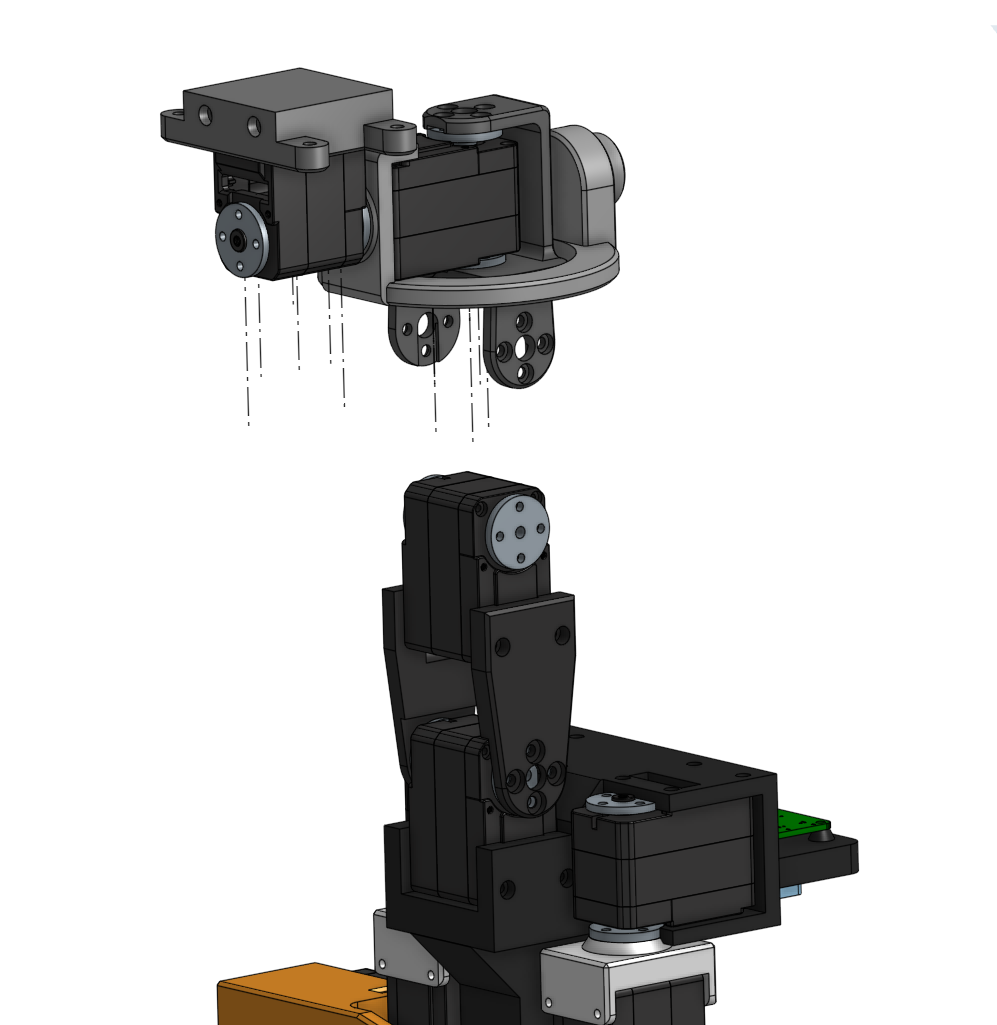

- 实际组装参考图

组装IMU
- 此处采取倒装IMU方式,使用舵机自带的
圆头十字自攻M2*6螺丝固定,BNO055字样朝下
- 实际组装参考图
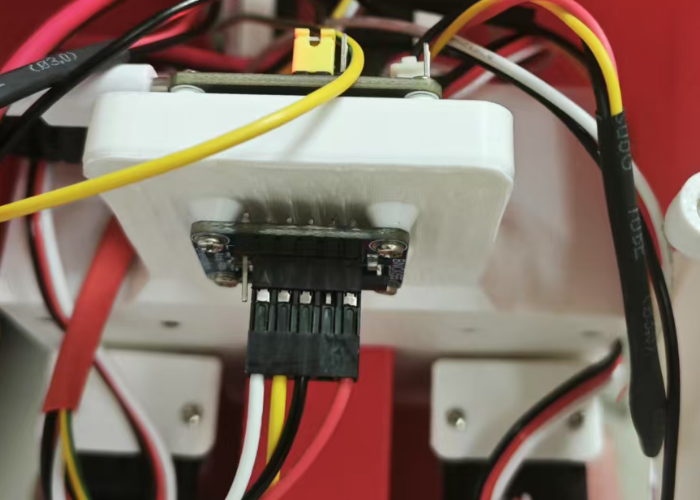
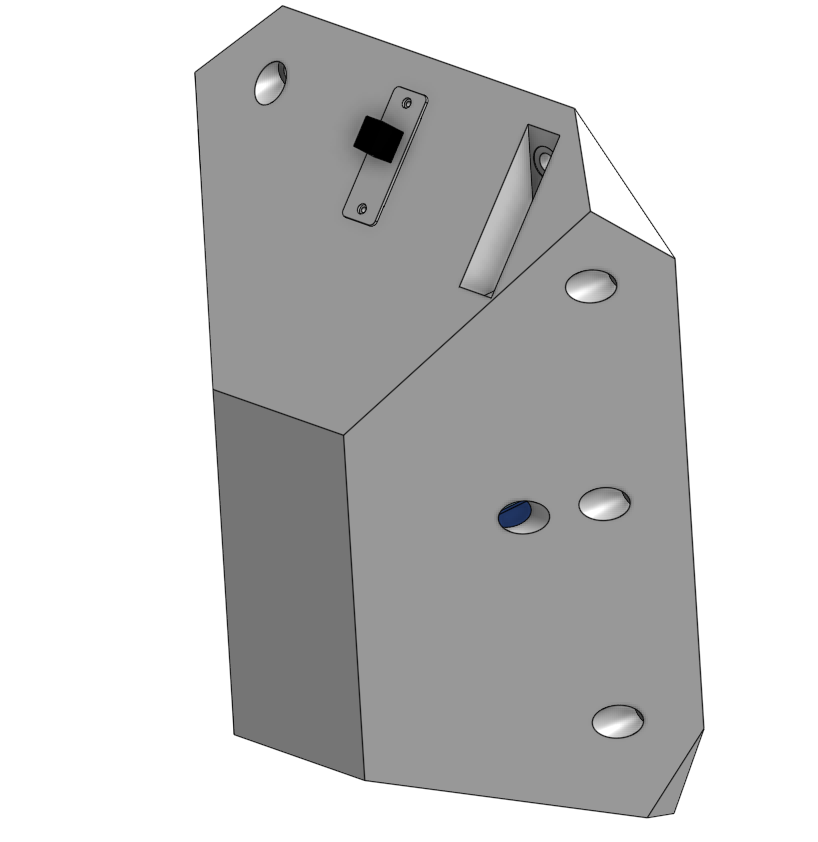
组装舵机驱动板
- 如图,使用舵机自带的
圆头十字自攻M2*6螺丝固定
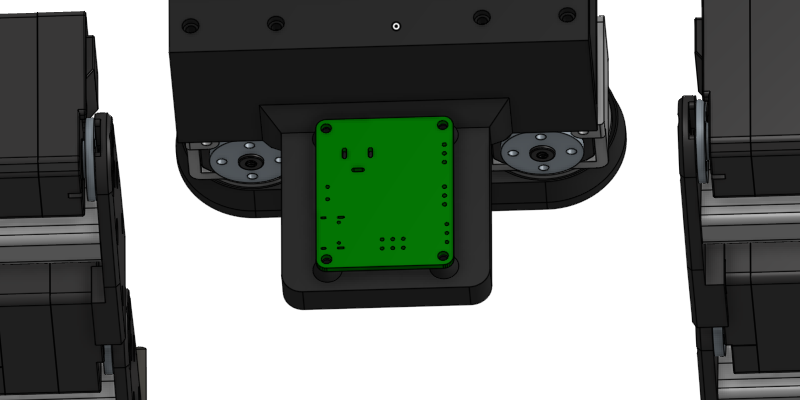
- 实际组装参考图

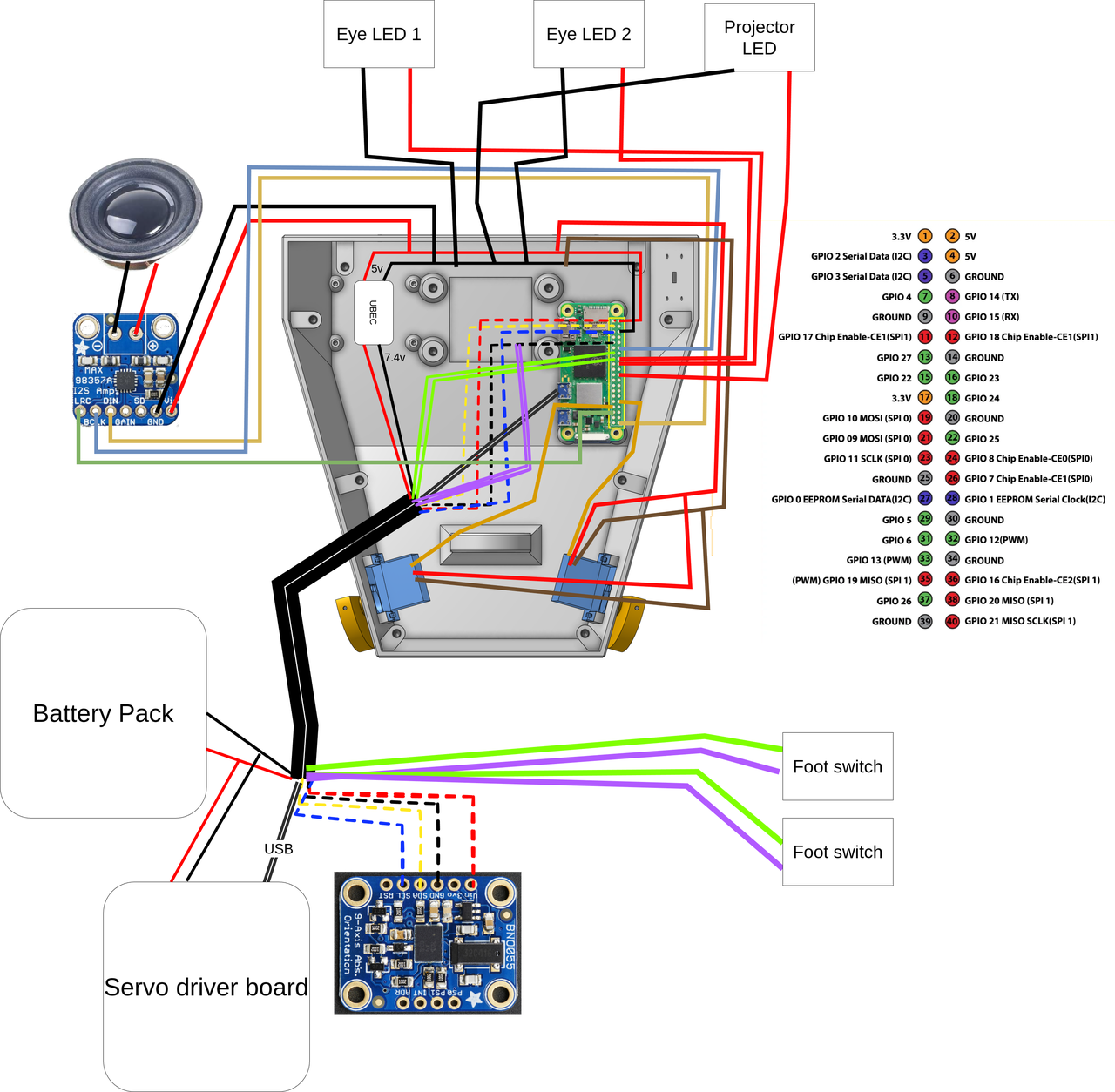
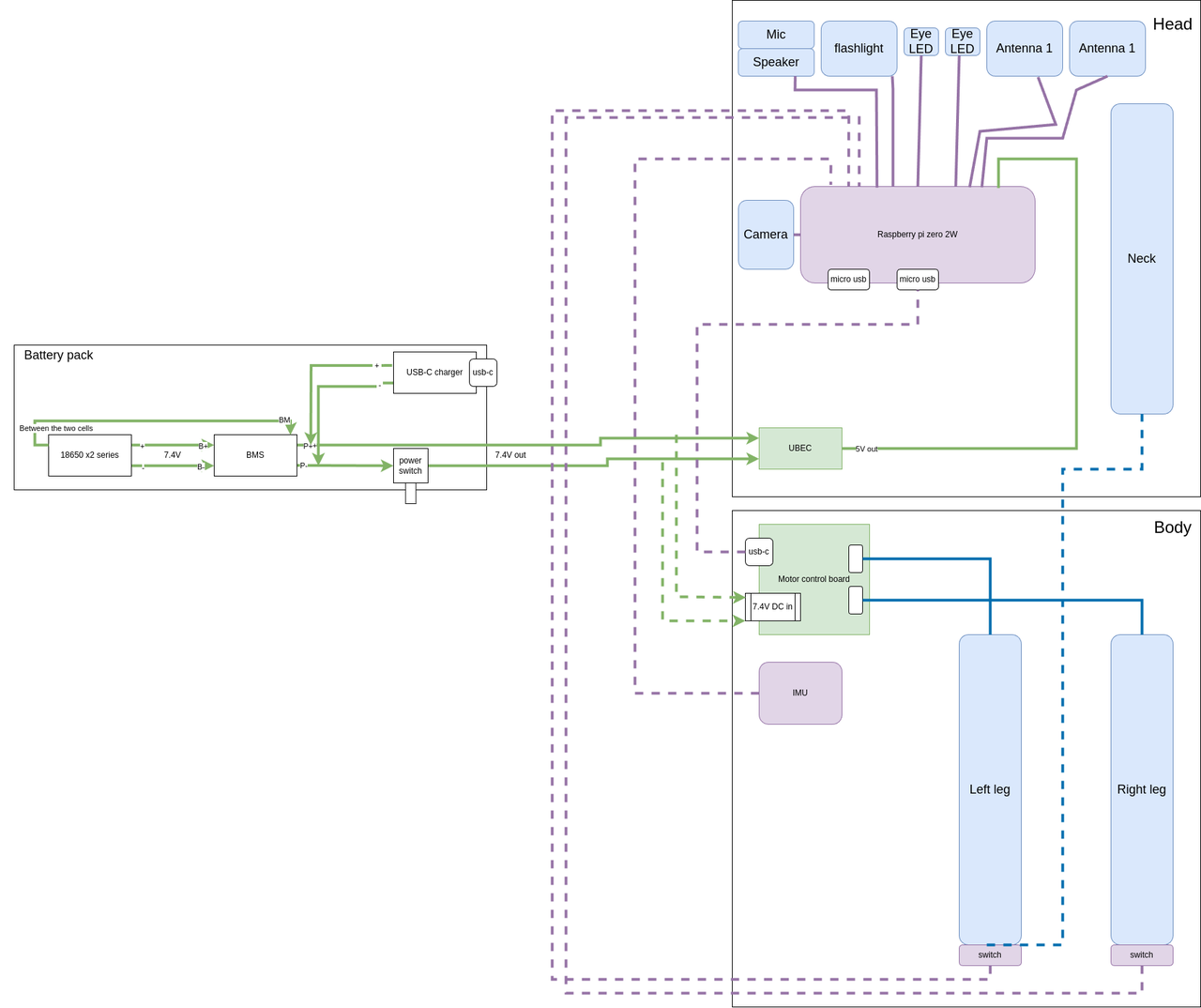
整体电路图
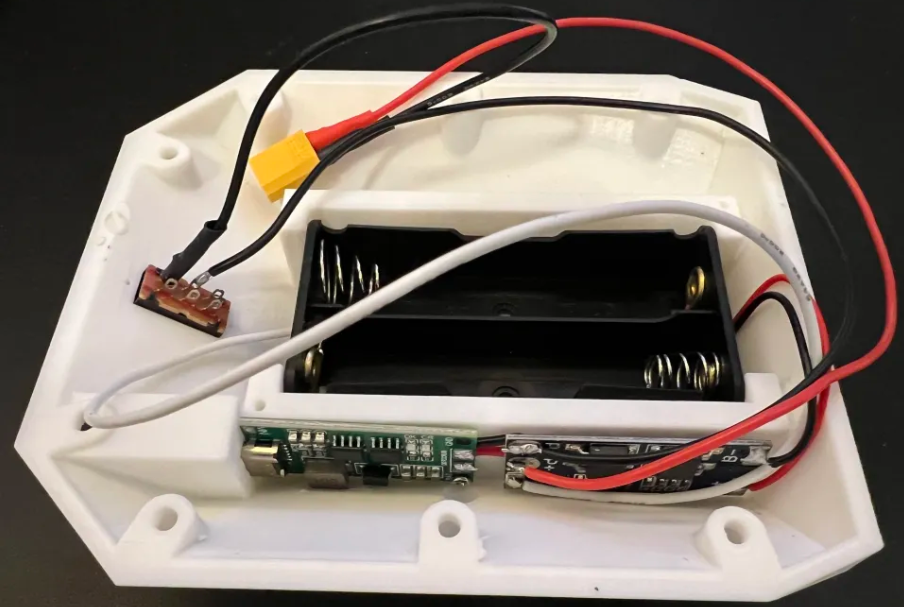
组装电池组
- 此部分教程只适合于官方的7.4v舵机版本所使用
- 如图,安装对应的电路板和电池盒
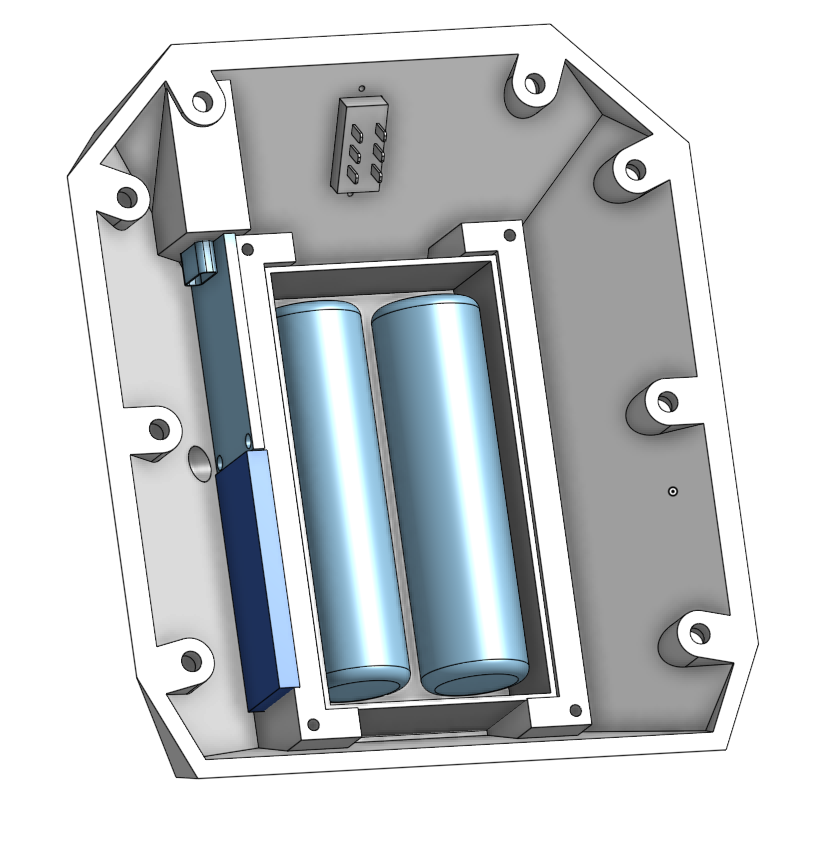
- 实际组装参考图
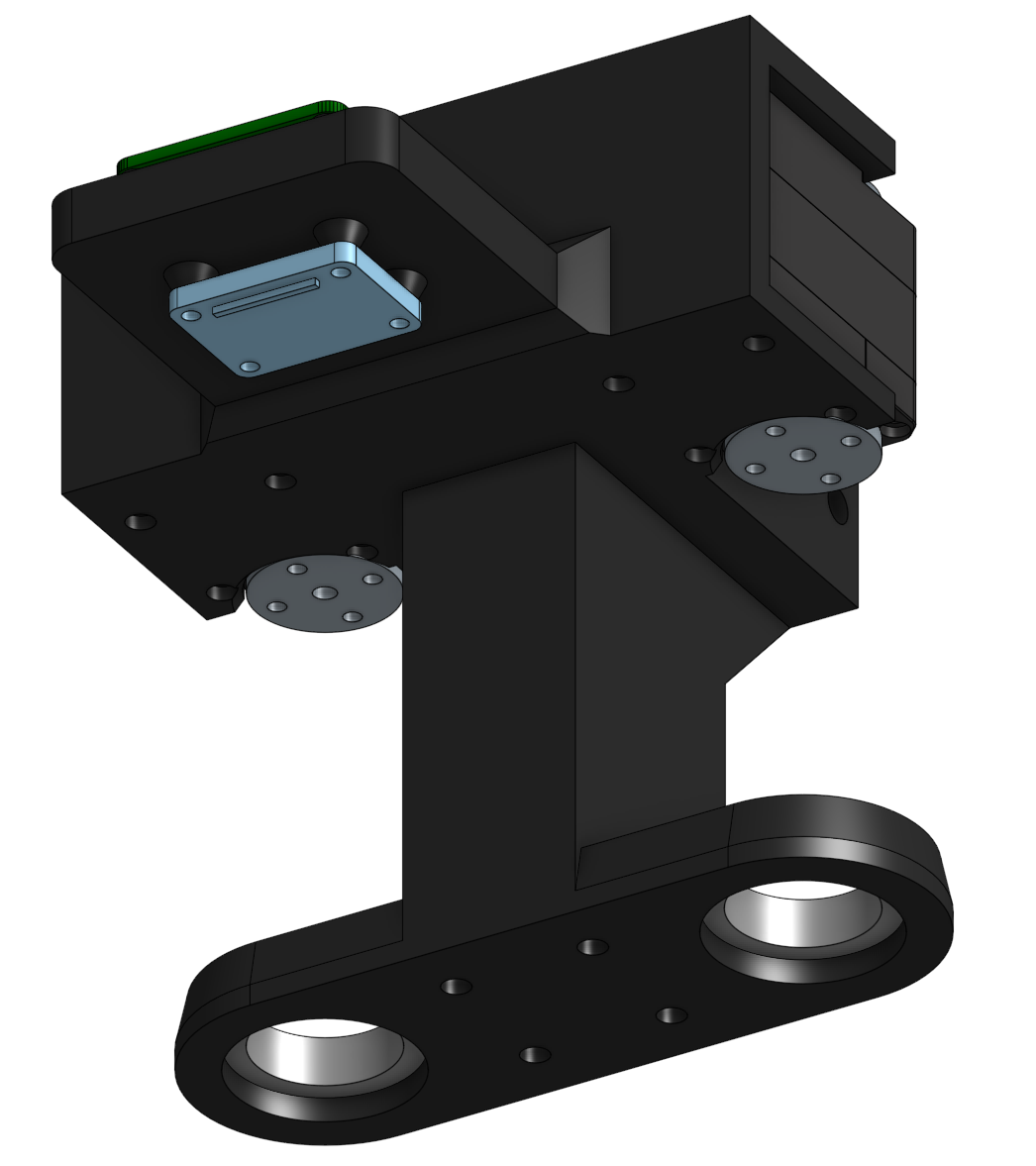
组装头部
- 提前在
head打印件上安装热熔镶嵌螺母
- 如图,将
树莓派、相机、ubec、扬声器、眼部LED、耳部舵机和6804轴承安装上去
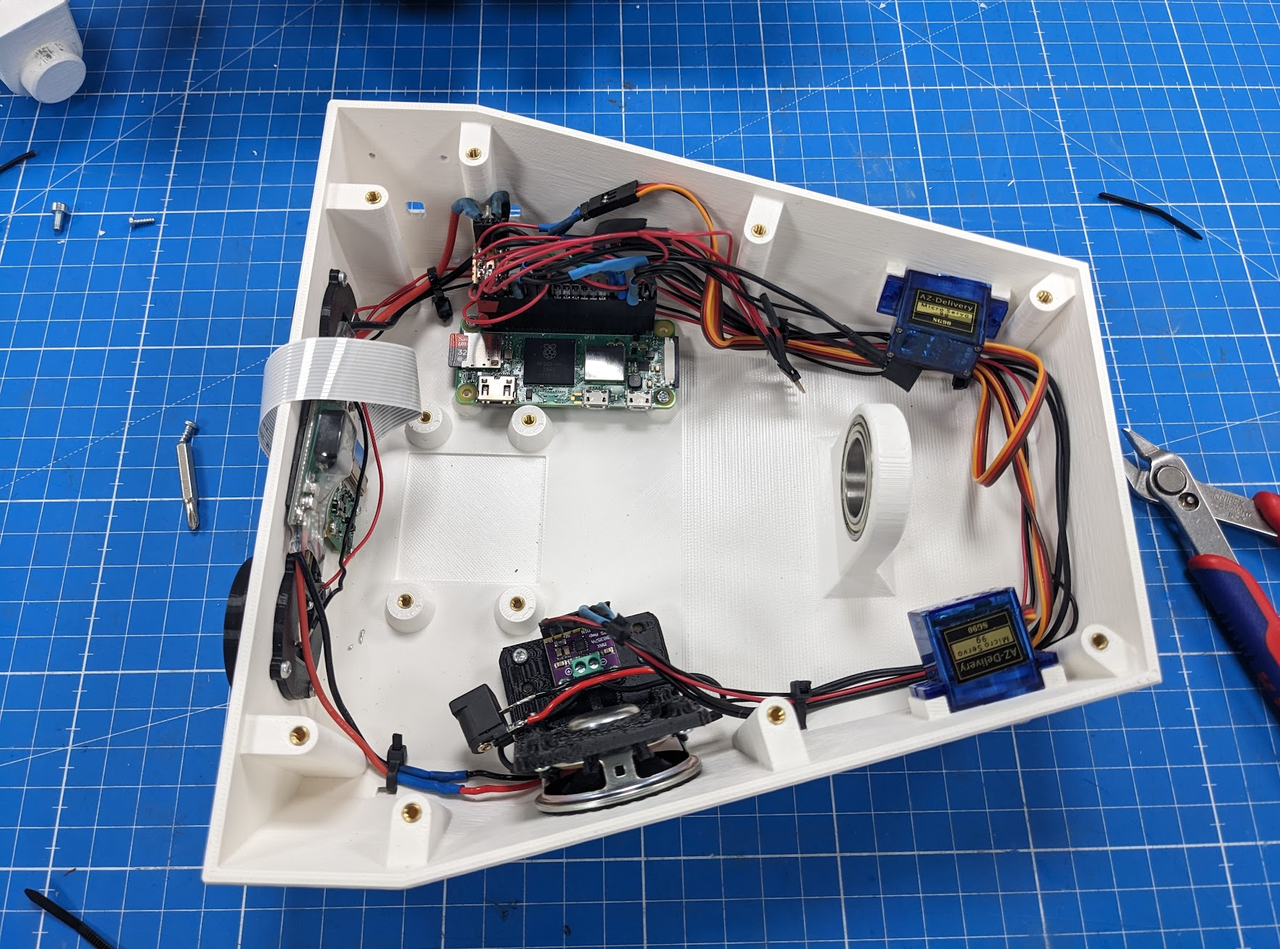
眼部LED这里应该使用圆头十字自攻M2*10螺丝进行安装,而相机则使用圆头十字自攻M2*4螺丝进行安装
在树莓派上接线时需要仔细检查是否接准确和确保没有松动
- 最后拼接剩下的部分,此处可使用
圆头十字M3*6螺丝进行固定
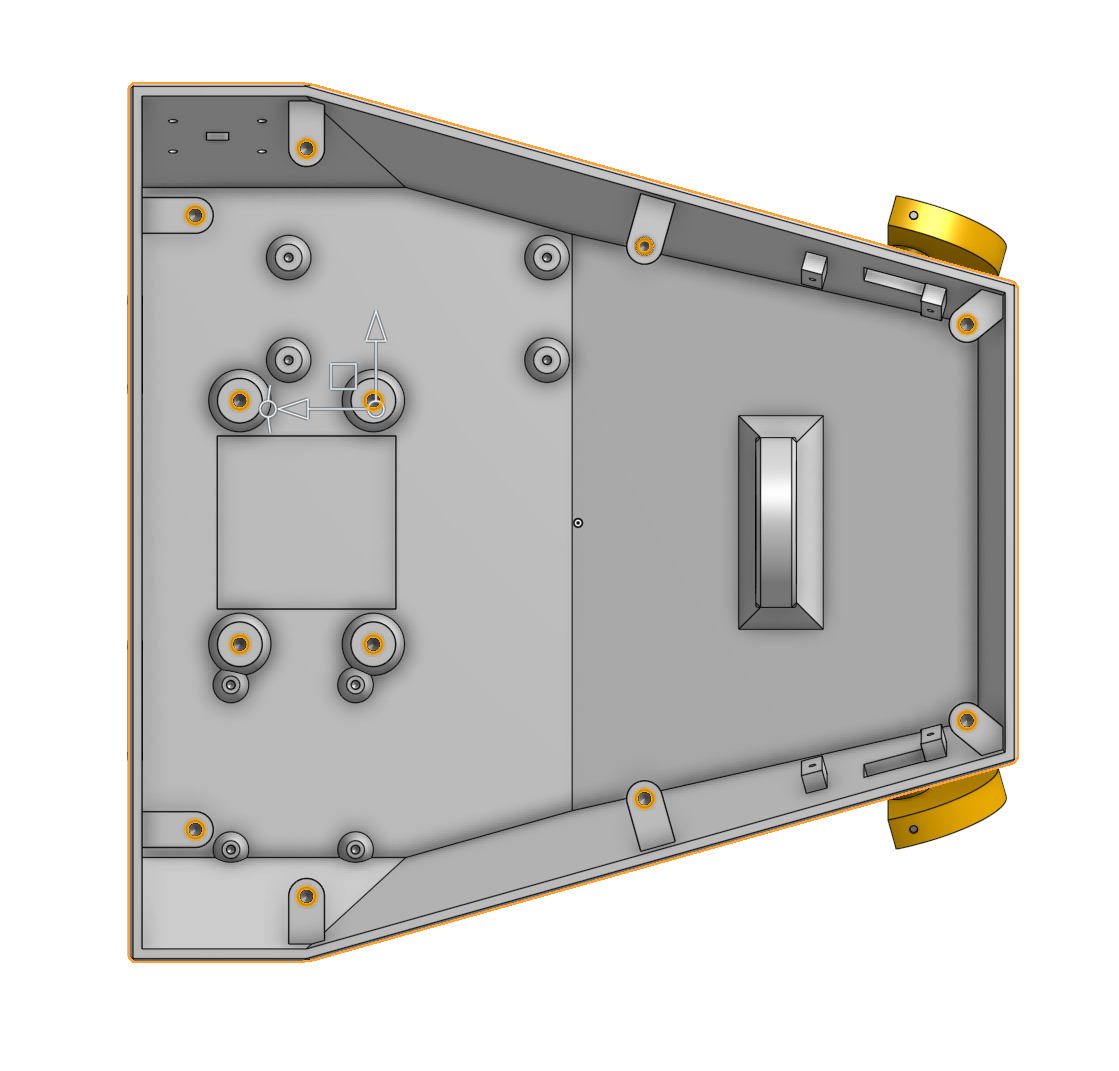
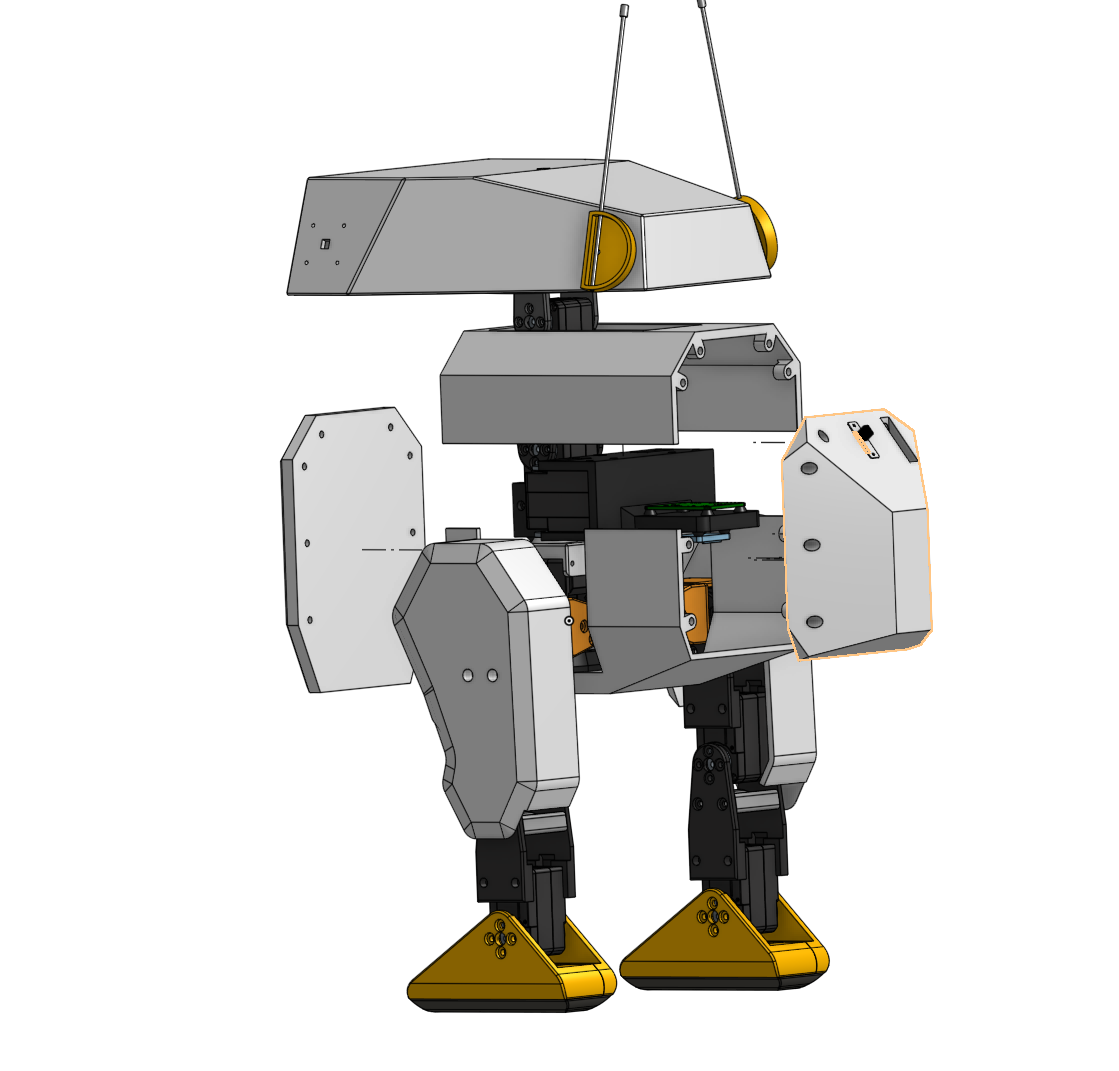
组装躯干外壳
- 如图,安装躯干外壳,此处可使用
圆头十字M3*10螺丝进行固定 - 安装时注意走线,底部引到树莓派上的线缆可以在
head_bot_plate打印件上的小圆孔上穿过
注意:此时如果没有提前套入head_bot_plate打印件和body_middle_top打印件到颈部位置,需要拆卸固定neck_pitch[ID:31]舵机的圆头十字自攻M2*6螺丝再套入去
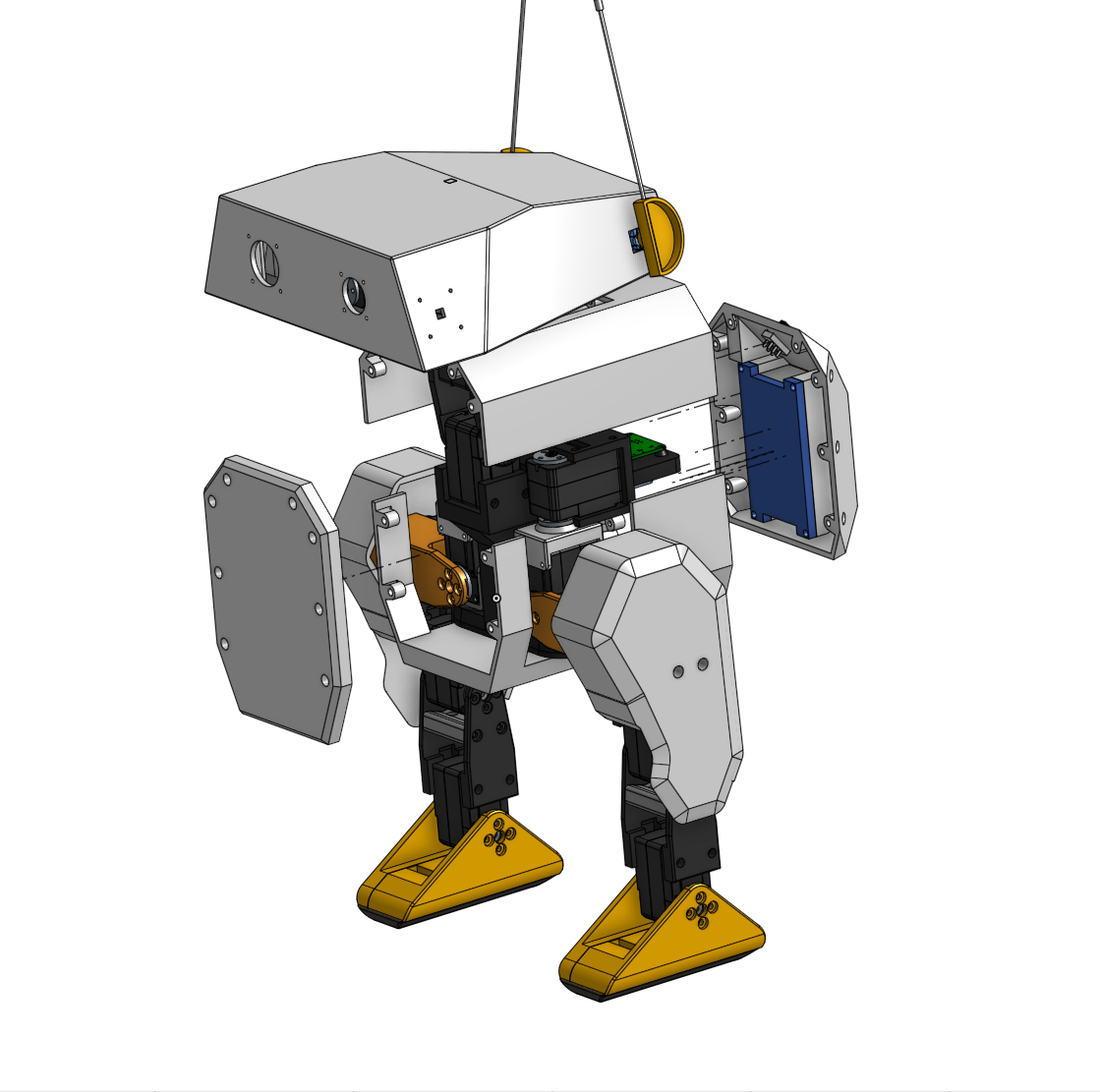
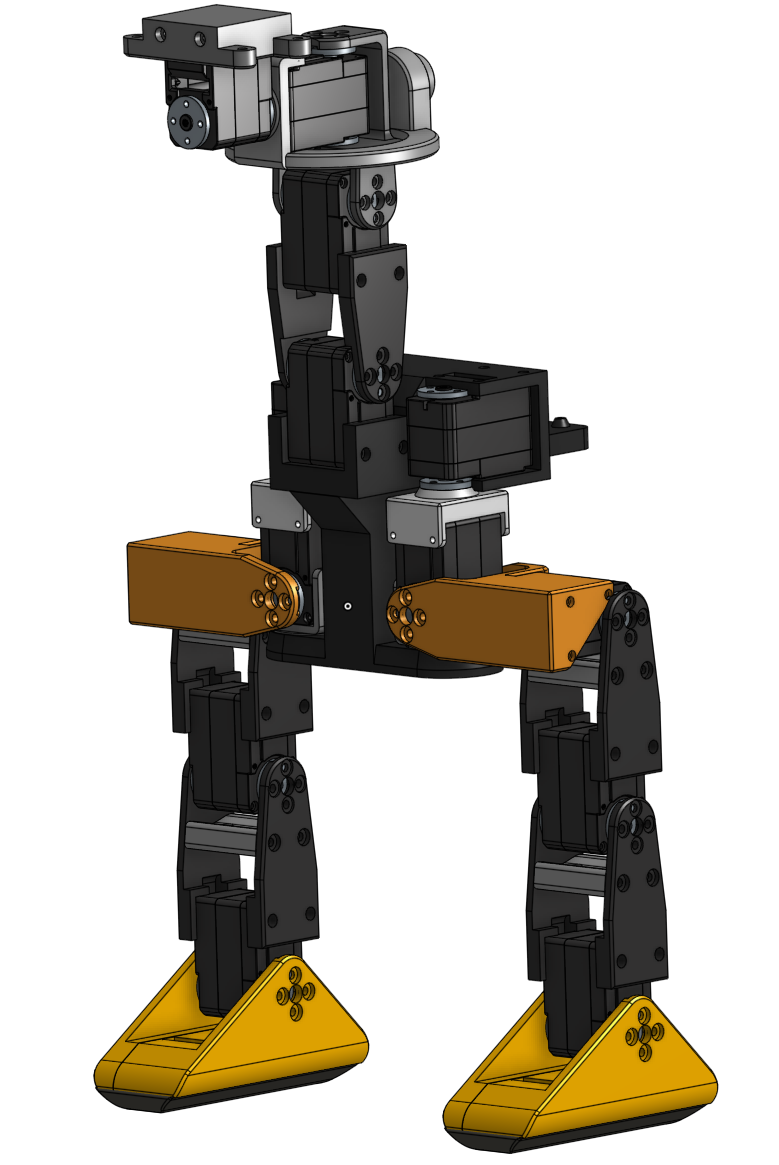
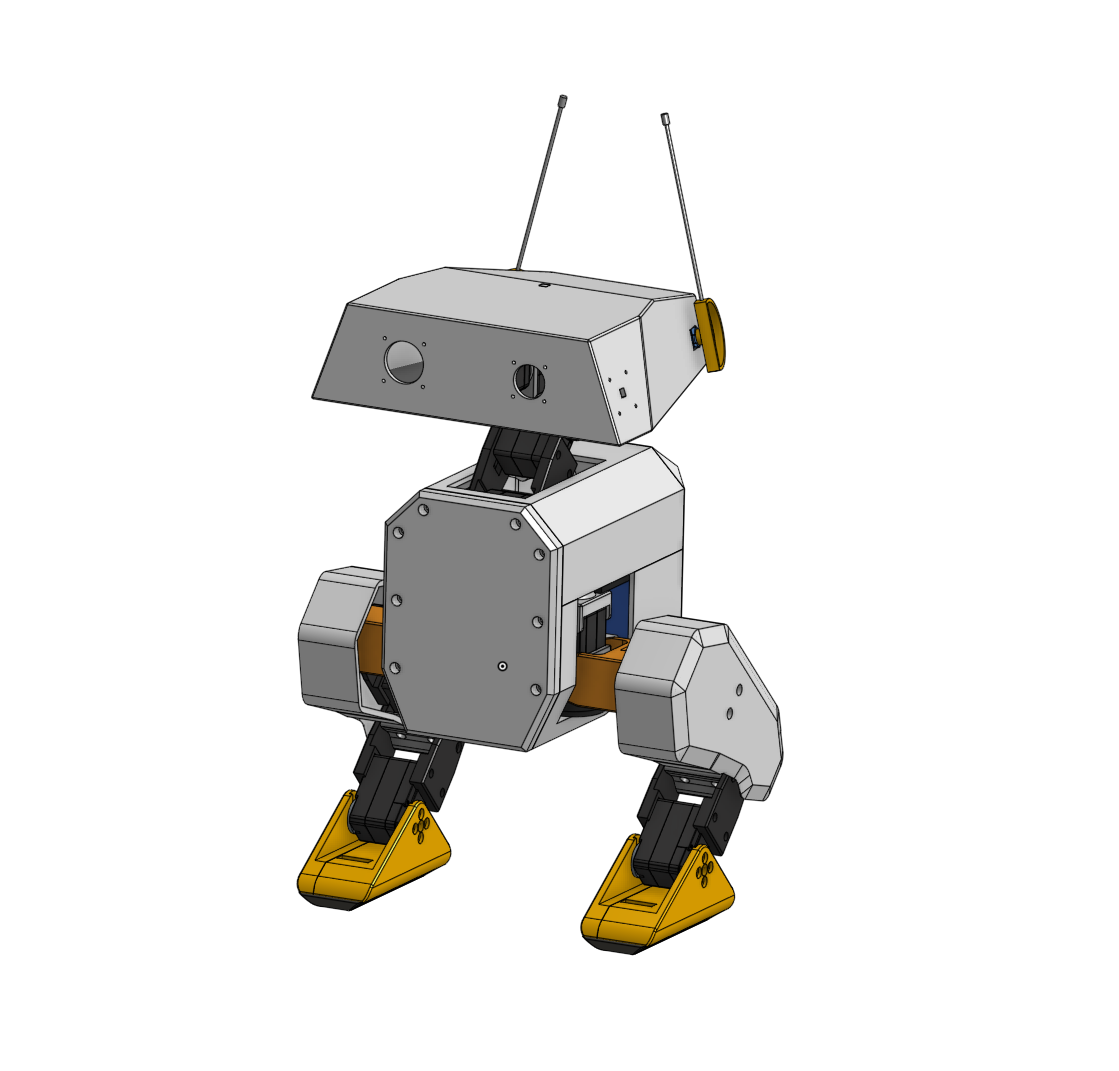
- 最终形态

参考资料
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的openduckmini交流群,微信扫描右侧二维码立即进群交流