



















Turtlebot3中级教程-应用-自动泊车
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍如何应用自动泊车功能
前提准备
-
[Remote PC] 安装applications样例库
-
[Remote PC] 安装依赖包
$ sudo apt-get install python-pip
$ sudo pip install numpy
$ sudo pip install --upgrade pip操作步骤
-
先准备一条宽度为10CM,长度20CM的黄色反光带,贴在墙上
-
贴条高度是跟小车高度平齐或高一些,保证雷达视线范围在贴条里。
-
[Remote PC] 启动roscore
$ roscore- [TurtleBot] 启动机器人
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch- [Remote PC] 启动remote文件
$ export TURTLEBOT3_MODEL=${TB3_MODEL}
$ roslaunch turtlebot3_bringup turtlebot3_remote.launch- [Remote PC] 启动rviz
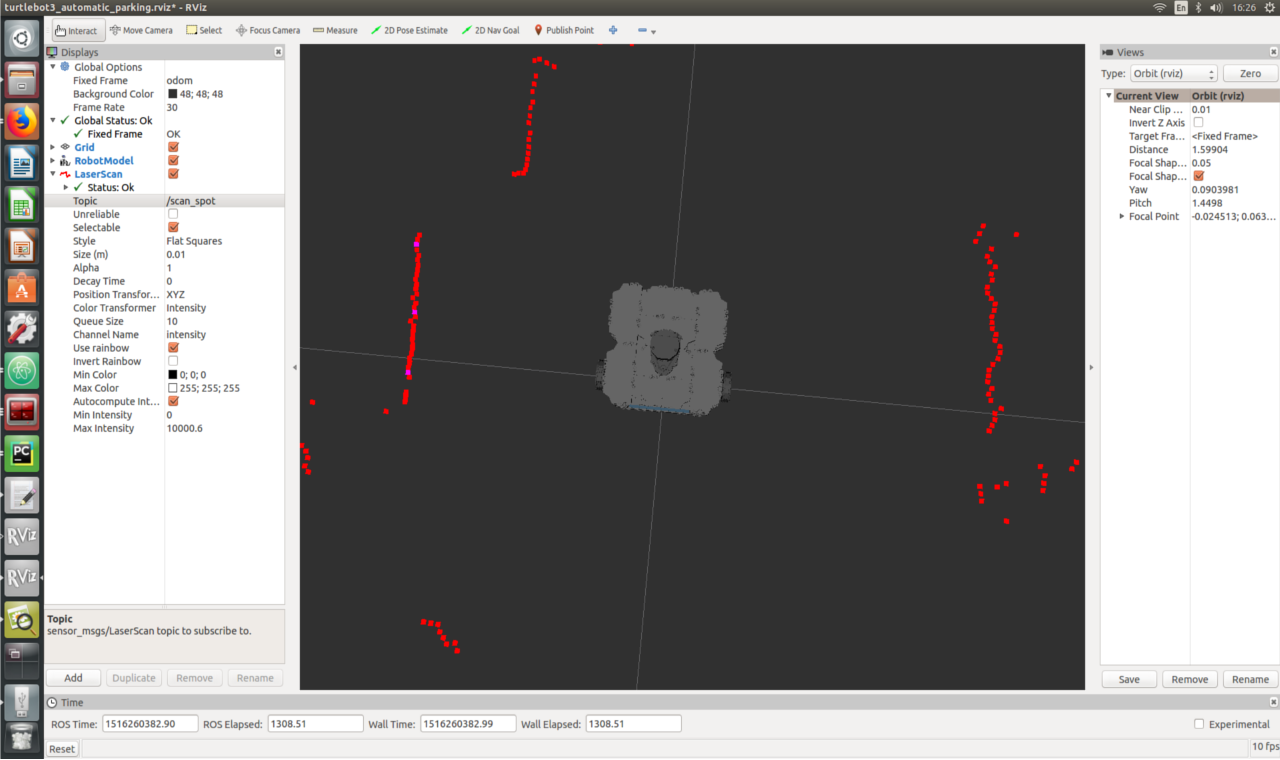
$ rosrun rviz rviz -d rospack find turtlebot3_automatic_parking/rviz/turtlebot3_automatic_parking.rviz- 可以切换不同话题查看激光数据
- 查看/scan话题

- 查看/scan_spot话题
- [Remote PC] 运行自动泊车
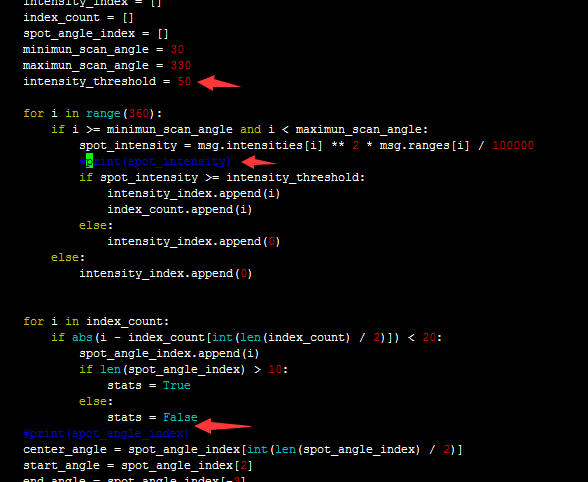
$ roslaunch turtlebot3_automatic_parking turtlebot3_automatic_parking.launch- 容易出现报错:
start_angle = spot_angle_index[2]
IndexError: list index out of range- 因为默认是阀值是100,如果得到的符合条件的激光数据太少就会报错。
- 可能需要测试多次才能成功,这个跟你找到的反光带有关系
- 可以通过打印出来了解应该使用什么阀值作为检测到的反光带的激光强度,如图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=66707041&cid=115687072&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流