



















Turtlebot3中级教程-应用-线路巡逻
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍如何实现小车根据固定线路行走
- 可以实现根据不同形状,正方形,圆形,三角形行走
前提准备
-
[Remote PC] 安装turtlebot3样例库
操作步骤
- [Remote PC] 启动roscore
$ roscore- [TurtleBot] 启动机器人
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch- [Remote PC] 启动Action服务端
$ rosrun turtlebot3_example turtlebot3_server- [Remote PC] 启动Action客户端
$ roslaunch turtlebot3_example turtlebot3_client.launch-
这个例子使用action话题, Action客户端转换数据(mode, area, count)给action服务器端.
-
action服务器端传输cmd_vel话题给小车
-
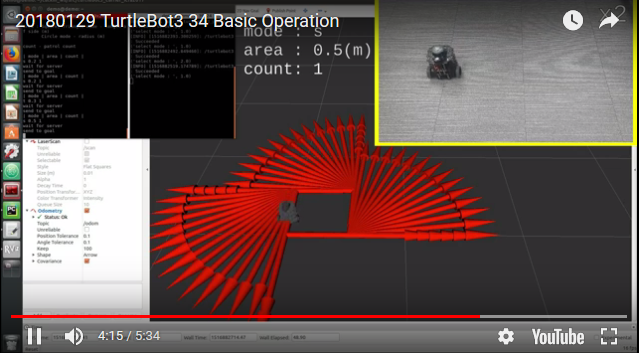
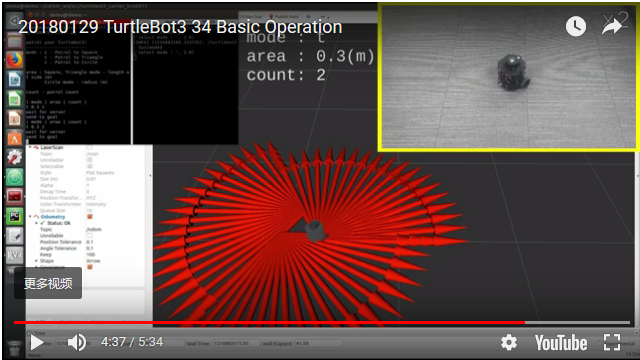
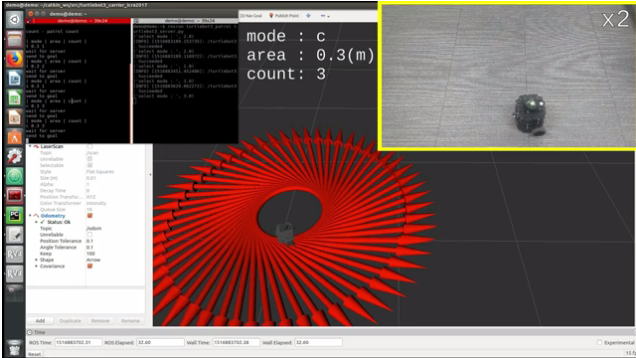
mode :
- s - Patrol to Square
- t - Patrol to Triangle
- c - Patrol to Circle- area :
- Square, Triangle mode - length of side (m)
- Circle mode - radius (m)-
count - patrol count
-
测试正方形效果图:
- 测试三角形效果图:
- 测试圆形效果图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流