



















Turtlebot3中级教程-应用-交互式标记
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍如果通过交互式标记来控制运动,直行或旋转
前提准备
-
[Remote PC] 安装turtlebot3样例库
操作步骤
- [Remote PC] 启动roscore
$ roscore- [TurtleBot] 启动机器人
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch- [Remote PC] 启动远程文件
$ export TURTLEBOT3_MODEL=${TB3_MODEL}
$ roslaunch turtlebot3_bringup turtlebot3_remote.launch- [Remote PC] 启动交互
$ roslaunch turtlebot3_example interactive_markers.launch- [Remote PC] 启动rviz
$ rosrun rviz rviz -d rospack find turtlebot3_example/rviz/turtlebot3_interactive.rviz-
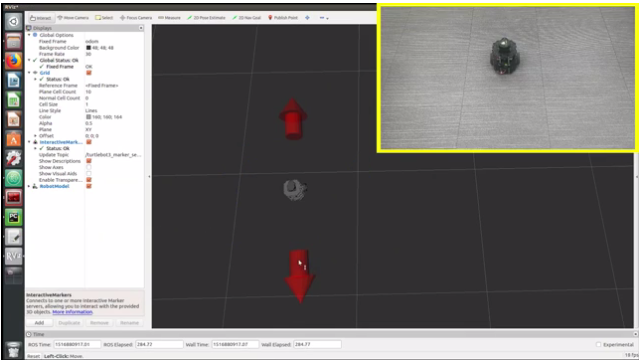
拖动交互图标前后箭头前后,控制小车前进和后退
-
拖动交互图标环形,控制小车旋转
-
效果图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=66698248&cid=115672131&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流