



















Turbot-AI多线入门教程-测试-底盘测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot-AI多线入门教程-测试-底盘测试
说明
- 介绍如何测试底盘
检查端口
- [Turbot] 检查是否有kobuki端口:
$ ls /dev/kobuki- [Turbot] 如果无,参考:kobuki_core代码解读-kobuki_ftdi,执行命令:
$ rosrun kobuki_ftdi create_udev_rules- 重新拔插底盘的USB串口线,再执行上面的检查语句
启动测试
- [Turbot] 执行启动底盘
$ roslaunch turbot_bringup minimal.launch-
执行命令后,会听到一串开机音乐
-
[Remote PC] 查看底盘状态
$ rostopic echo /mobile_base/sensors/core
header:
seq: 1651
stamp:
secs: 1577781919
nsecs: 925320804
frame_id: ''
time_stamp: 5660
bumper: 0
wheel_drop: 0
cliff: 0
left_encoder: 60270
right_encoder: 64754
left_pwm: 0
right_pwm: 0
buttons: 0
charger: 22
battery: 165
bottom: [1710, 1994, 1679]
current: [0, 0]
over_current: 0
digital_input: 0
analog_input: [4095, 4095, 4095, 4095]
---- [Turbot] 执行命令
$ rosrun turbot_tools test_move-
成功执行命令后,小车向前缓慢移动,按Ctrl + C 即可中止
-
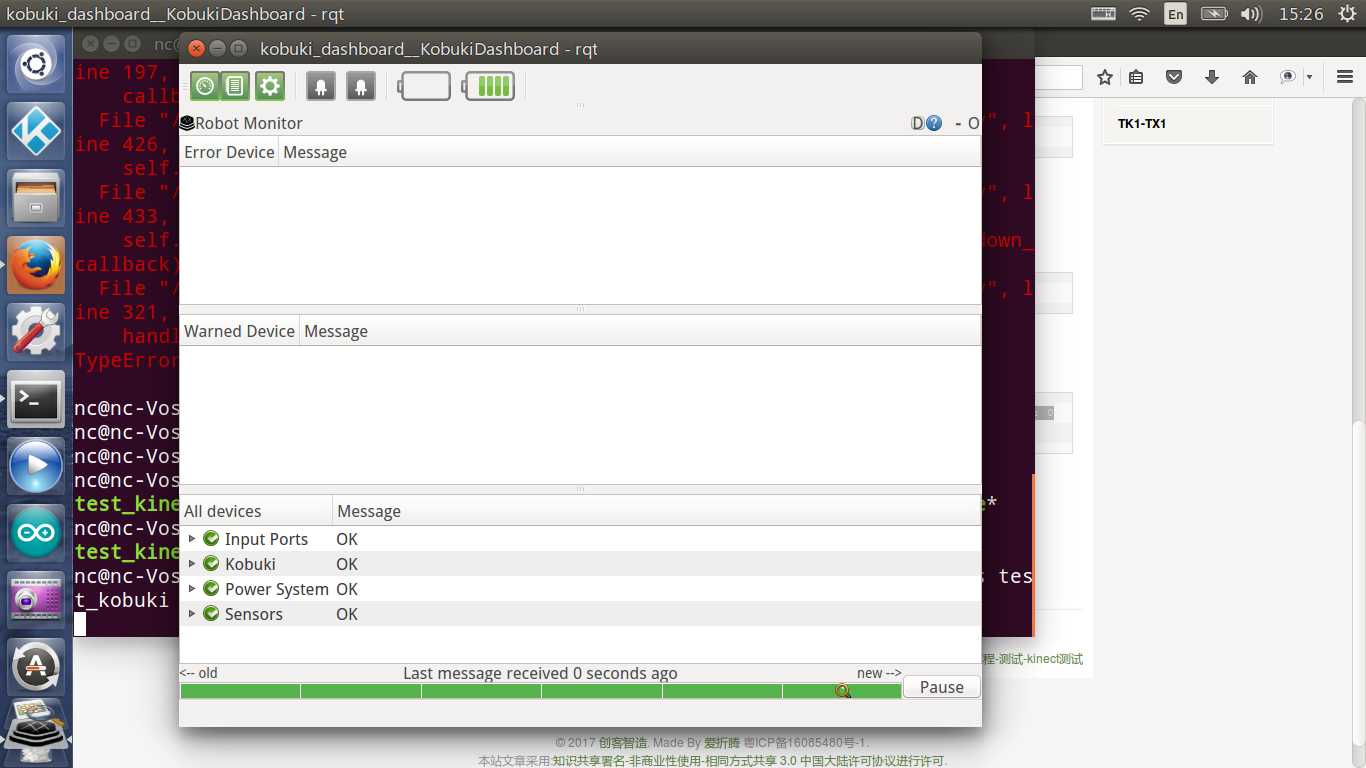
[Remote PC] 执行显示仪表盘
$ rosrun turbot_tools test_kobuki- 效果:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号