



















autoware入门教程-ROSBAG示例
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autoware入门教程-ROSBAG示例
说明:
- 介绍如何在autoware中使用ROSBAG
- 测试环境:autoware1.2.0 + jetpack33
步骤:
- 新建目录保存数据
mkdir -p ~/autoware_demo
cd ~/autoware_demo- 下载3D pointcloud/vector map data
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz- 下载ROSBAG data
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz- 创建.autoware
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/autoware_demo/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz- 假设autoware安装在autoware.ai,启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch- 启动后出现一个管理界面,点击Simulation按钮
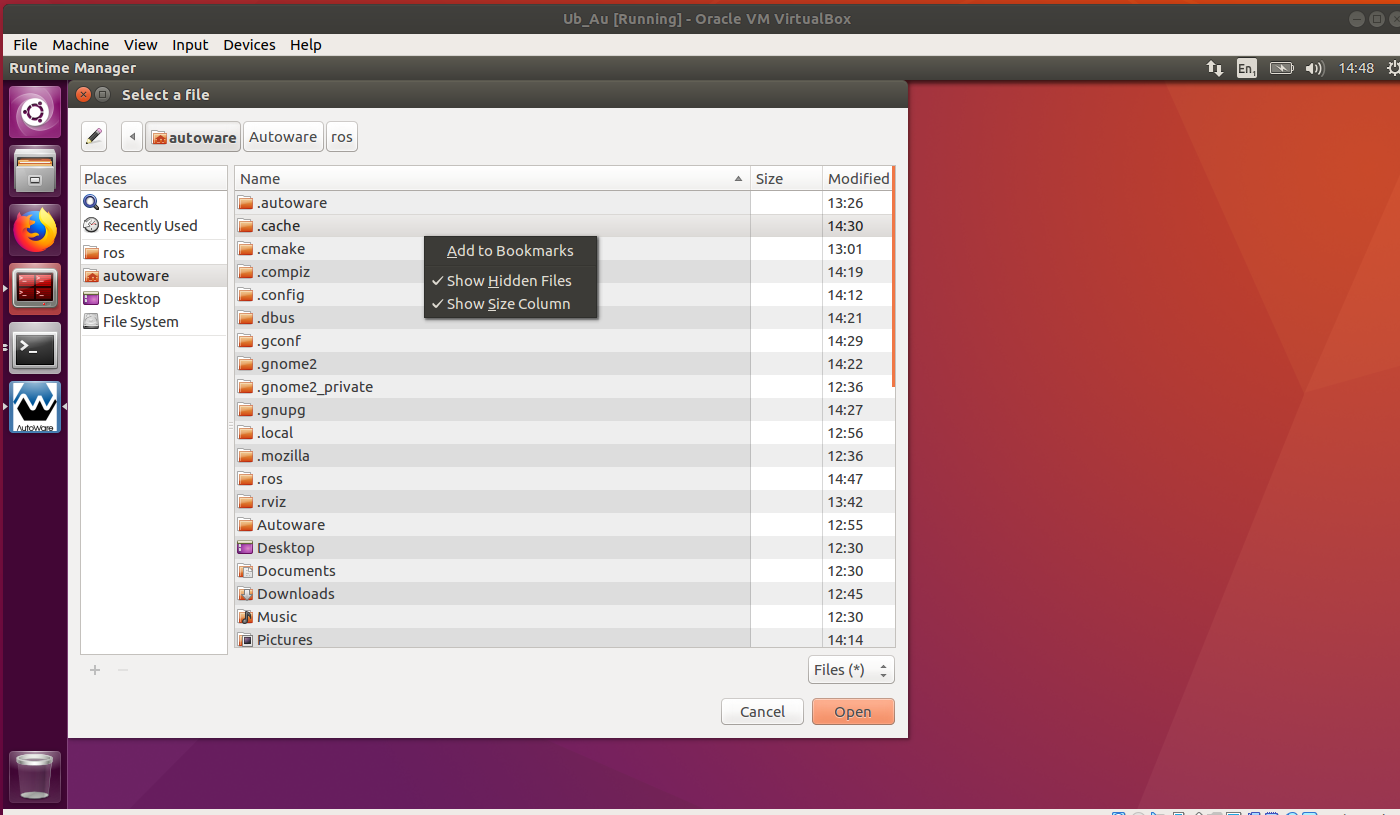
- 再点击ref,选择~/.autoware下选择对应的rosbag包
- 具体路径:
/home/ubuntu/.autoware/sample_moriyama_150324.bag- 如图:
- 再设置时间为140,先点击Play ,再点击Pause
- 如图:
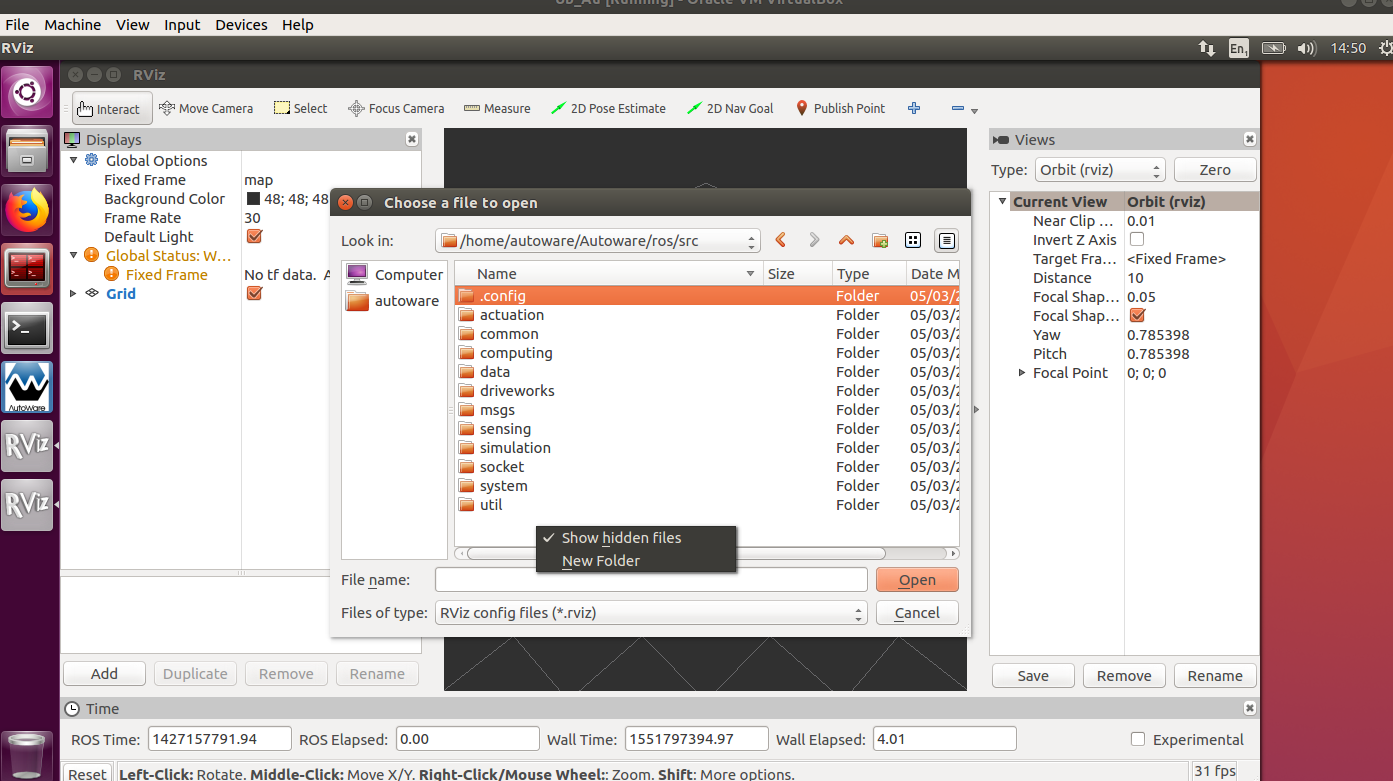
- 点击管理界面左下角的RViz,启动rviz。
- 在弹出的rviz,选择File -> Open Config
- 具体路径
~/autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz- 如图:
- 点击管理界面的Quick Start按钮
- 具体路径为:
~/autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/- 加载map输入行后面的ref,选择对应的的luanch文件,my_map.launch
- 如图:

- 点击管理界面,切换到Simulation,再点击按钮Pause,让重新开始,就会出现点云图

- 加载sensing输入行后面的ref,选择对应的的luanch文件,my_sensing.launch
- 加载localization输入行后面的ref,选择对应的的luanch文件,my_localization.launch
- 加载detection输入行后面的ref,选择对应的的luanch文件,my_detection.launch
- 加载mission_planning输入行后面的ref,选择对应的的luanch文件,my_mission_planning.launch
- 加载motion_planning输入行后面的ref,选择对应的的luanch文件,my_motion_planning.launch
- 效果图:


问题:
- 问题1:lane data is something wrong
- 指定具体moriyama_path文件路径,修改为如下:
<include file="$(find waypoint_maker)/launch/waypoint_loader.launch">
<arg name="load_csv" value="true" />
<arg name="multi_lane_csv" value="$(env HOME)/.autoware/data/path/moriyama_path.txt" />
</include>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号