



















autoware入门教程-使用Euclidean Clustering进行检测
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autoware入门教程-使用Euclidean Clustering进行检测
说明:
- 介绍如何在autoware中使用Euclidean Clustering进行检测
步骤:
- 启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch- 在管理界面上切换到Simulation分页
- 点击输入框后面的Ref,加载rosbag包
- 具体路径: /home/ubuntu/.autoware/sample_moriyama_150324.bag
- 再点击Play,接着点击Pause
- 效果如图:

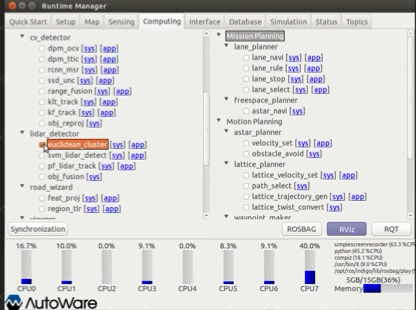
- 再切换到Computing分页
- 勾选lidar_detection-> 下的Euclidean Cluster
- 效果如下:
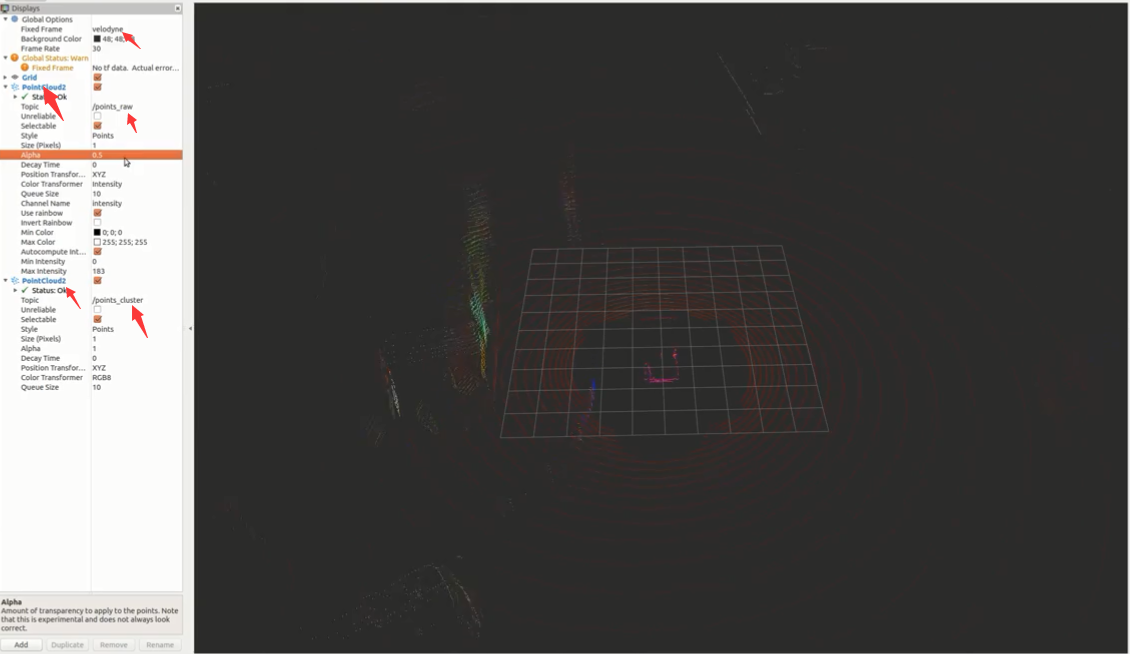
- 再点击RVIZ打开rviz
- 点击Add,选择point_raw, pointClound2
- 再点击Add,选择point_cluster, pointClound2
- 效果如图:
- 再点击Add,选择boundingBoxArray,topic为bounding_box

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号