



















autoware入门教程-配置LGsvl Simulator
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autoware入门教程-autoware配置LGsvl Simulator
介绍:
- 介绍如何配置LGsvl Simulator
- 环境autoware 1.12.0/1.13.0
步骤:
- 直接点击Simulation分页下LGSVL Simulator会报错
[rosrun] Couldn't find executable named rqt_lgsvl_simulator_configurator below /home/autoware/Autoware/ros/install/lgsvl_simulator_bridge/share/lgsvl_simulator_bridge- 问题主要是启动文件的位置发生变化
- 旧路劲存放在
~/autoware.ai/src/autoware/simulation/lgsvl_simulator_bridge- Autoware 1.12 版本中 编译系统采用了 colcon,编译之后 package 路径会定位到 install 文件夹下
~/autoware.ai/install/lgsvl_simulator_bridge/share/lgsvl_simulator_bridge- 解决方法
- 旧路径下的整个 resource 文件夹拷贝到新路径下
- 旧路径下的 plugin.xml 文件拷贝到新路径下
- 旧路径下的整个 scripts 文件夹拷贝到新路径下
- 旧路径下的 src/lgsvl_simulator_bridge 文件夹中的 configurator.py 拷贝到新路径的 scripts 文件夹中
- 新结构如下:
.
├── cmake
│ ├── lgsvl_simulator_bridgeConfig.cmake
│ └── lgsvl_simulator_bridgeConfig-version.cmake
├── config
│ ├── sample.json
│ └── setting.dat
├── hook
│ ├── cmake_prefix_path.ps1
│ ├── cmake_prefix_path.sh
│ ├── pkg_config.ps1
│ ├── pkg_config.sh
│ ├── python2path.ps1
│ ├── python2path.sh
│ ├── ros_package_path.ps1
│ └── ros_package_path.sh
├── launch
│ ├── bridge.launch
│ └── lgsvl_simulator.launch
├── media
│ ├── autoware.png
│ └── lgsvl_simulator_bridge.png
├── package.bash
├── package.ps1
├── package.sh
├── package.xml
├── package.zsh
├── plugin.xml
├── resource
│ └── LgsvlSimulatorConfigratorPlugin.ui
├── rviz
│ └── lgsvl_simulator.rviz
└── scripts
├── configurator.py
├── launch_sim.bash
└── rqt_lgsvl_simulator_configurator测试
- 启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
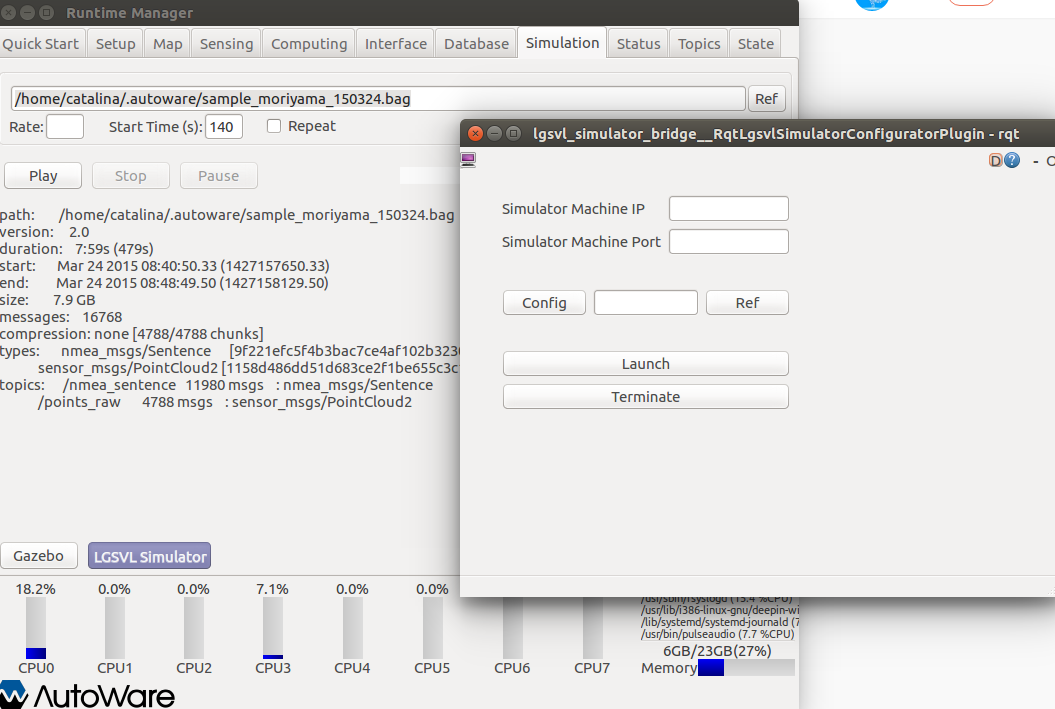
$ roslaunch runtime_manager runtime_manager.launch- 点击simulator分页下的LGSVL Simulator ,效果如图:
问题:
- 对于autoware1.12.0版本的rosbridge需要重新编译,要不连接lgsvl会有问题
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号