



















PX4与仿真入门教程-volans-ompl3Drrt全局路径规划
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4与仿真入门教程-volans-ompl3Drrt全局路径规划
说明:
- 介绍如何实现rrt全局路径规划
- 代码还没完善,有待优化
步骤:
- 启动程序
cd ~/tools/volans
source load_environment.sh
roslaunch simulation ompl3Drrt_px4.launch- 发布目标点
rostopic pub /clicked_point geometry_msgs/PointStamped "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
point:
x: 10.0
y: 0.0
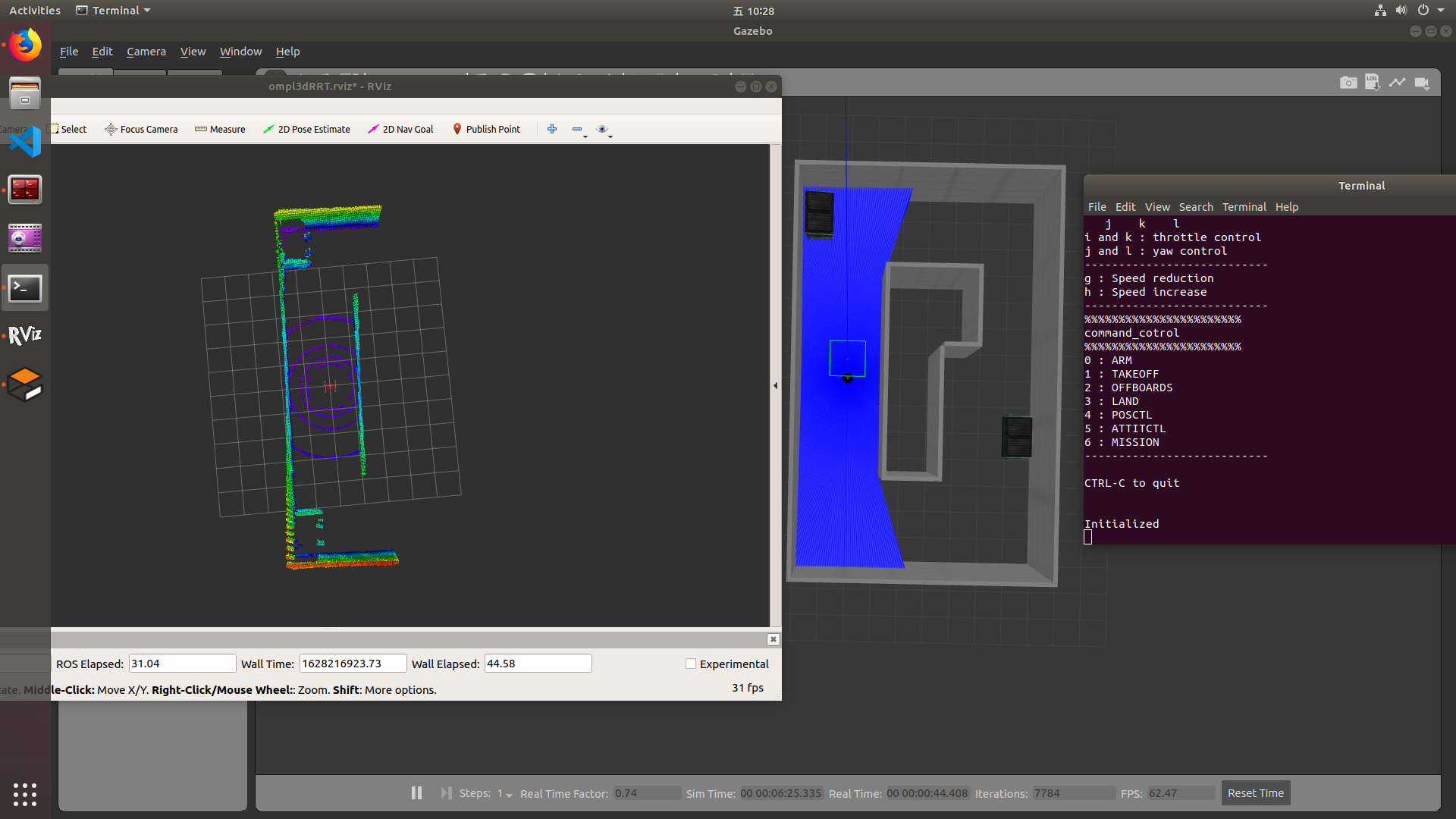
z: 0.0"- 效果图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号