



















Turbot-AI多线入门教程-autoware真机-回放建图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot-AI多线入门教程-autoware真机-回放建图
说明:
- 介绍如何通过回放录制的数据包来进行建图
步骤:
- 以下Runtime Manager界面下操作
roslaunch runtime_manager runtime_manager.launch- 在Simulation分页下,点击Ref,选择rosbag位置
- 效果如下:

- 在Simulation分页下,点击打开Rviz
- 选择ndt_mappint.rviz, 位置在~/turtlebot_ws/src/turbot/turbot_autoware/rviz/ndt_mapping.rviz
- 效果如下:
- 在Computing分页下,选择lidar_localizer ->ndt_mapping
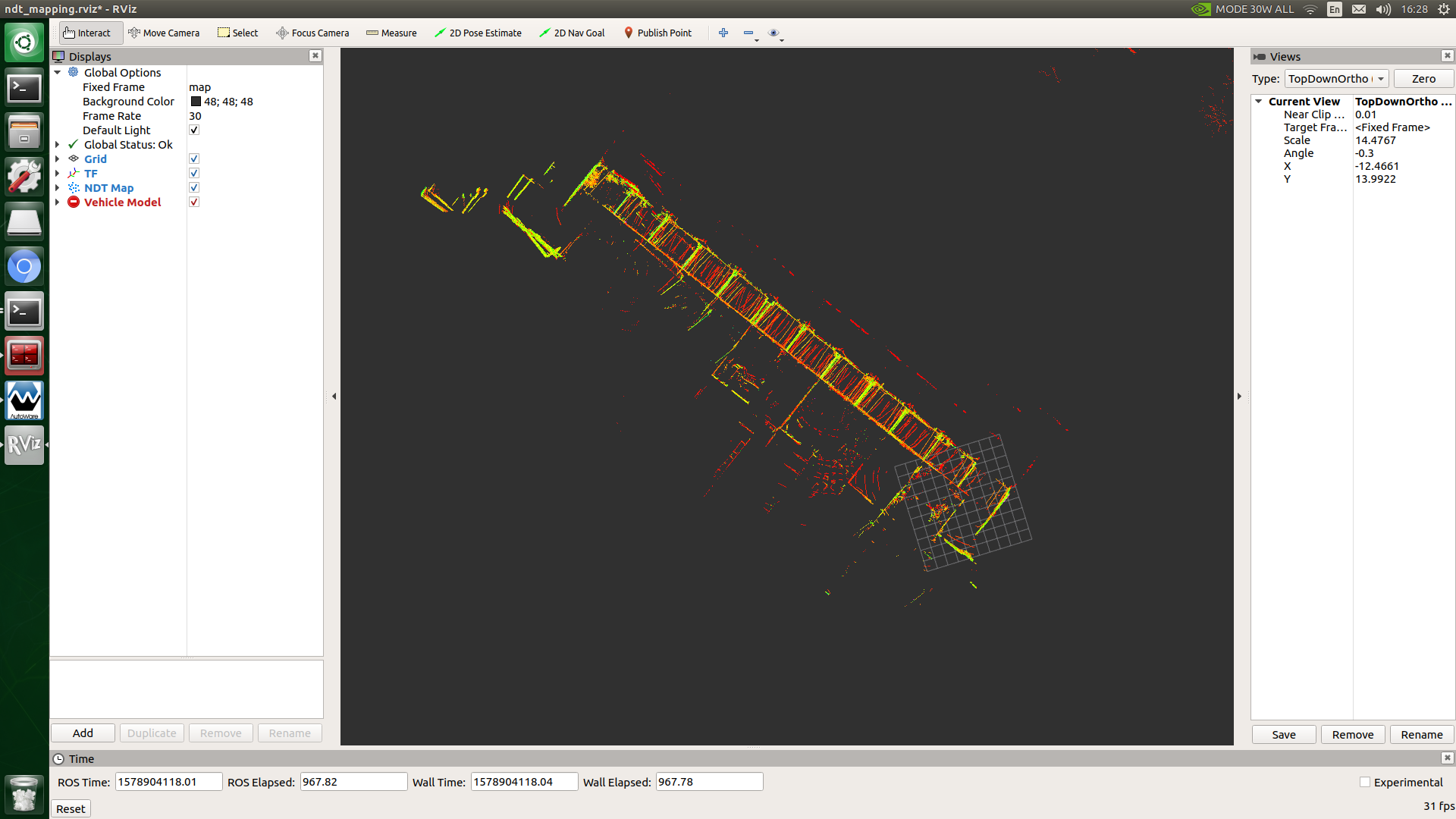
- 再切换到Simulation分页下,点击play,播放数据包
- 数据播放结束后,待建图进程也结束
- 效果如下:
- 再切换Computing分页下,点击lidar_localizer ->ndt_mapping后的app
- 选择底部输入框后的Ref,选择保存地图的路径和名称
- 需要指定地图保存在~/autoware.ai/autoware-data/turbot/data/map/pointcloud_map
- 在点击PCD OUTPUT,进行保存
- 效果如下:

演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=582891968&bvid=BV1T64y1M7au&cid=183814746&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号