



















PX4与仿真入门教程-dronedoc-使用 MoveIt! 移动 Gazebo 模型
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4与仿真入门教程-dronedoc-使用 MoveIt! 移动 Gazebo 模型
说明:
- 介绍如何利用MoveIt! 移动 Gazebo 模型
- 我们将使用目前创建的 iris_moveit_config 包和 MoveIt! RViz 插件来规划操作和控制无人机。
- 为了能够移动无人机,需要实现插件,动作服务器等 所以首先我将解释如何使用MoveIt移动机器人!以及这次使用的应用程序的概述。
控制方法:
- 使用 MoveIt 移动机器人,主要是
使用 MoveIt 提供的控制器管理器!
使用 ros_control- 有两种方法。下面分别介绍这两种方法
使用控制器管理器:
-
在 MoveIt! Rviz 演示中,我们使用 RViz 来规划无人机的操作。当运动计划完成时,生成的无人机的运动显示在 RViz 中,但由于只有计划显示在 RViz 中,因此需要向机器人发送控制输入等的控制器来实际移动机器人。
-
控制机器人所需的控制规则和输入因机器人类型而异,因此不同的机器人必须使用不同的控制器。然而,MoveIt! 开发人员每次都为不同的机器人实现所有控制器,或者将某人实现的控制器合并到MoveIt! 中是不现实的。因此,MoveIt! 使用了ROS 动作机制,因此任何支持 MoveIt! 提供的动作的控制器都可以使用。
-
ROS action 是一种节点之间进行一对一通信的机制,类似于 ROS 服务。当客户端向服务器发送请求时,服务在返回结果之前不会收到服务器的任何反馈,但动作会根据执行状态返回反馈。另外,动作可以在中间中断,适用于机器人从开始到目标移动等耗时处理。
-
在MoveIt!中,如下图,控制器接口(以下简称接口)中定义的动作客户端向控制器中定义的动作服务器发送动作目标,即动作的目的,以及接收它的动作。服务器采取向机器人输入控制命令的形式。所使用的接口取决于所使用的操作类型。
-
下图中的控制器管理器(以下简称管理器)具有向 MoveIt 注册接口的作用!通过向 MoveIt 注册接口,当接收到执行生成操作的命令时,将操作信息发送到接口,并从那里发送到控制器。管理器有多种类型,每种类型都有不同的可用接口。

- 执行生成操作的流程如下所示。
1.有关要执行的操作的信息被发送到接口
2.接口向动作服务器发送动作目标
3.接收动作目标的控制器向机器人发送控制输入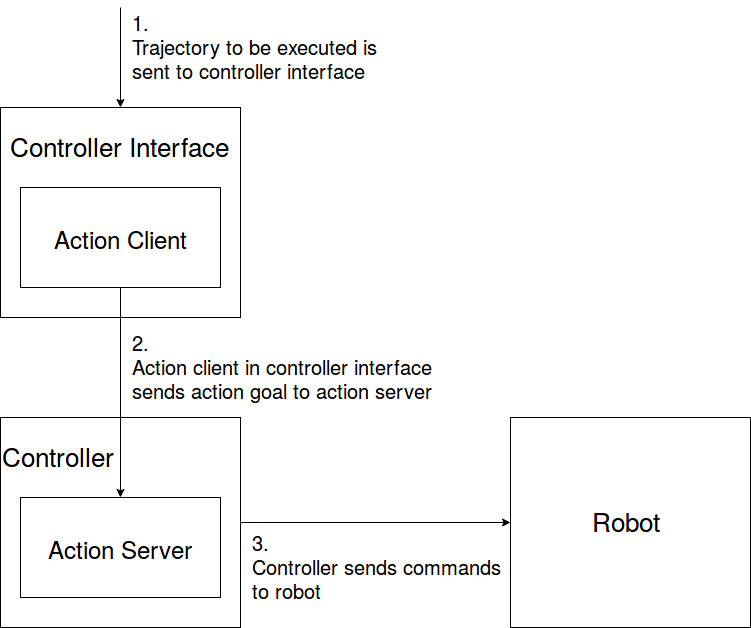
-
综上所述,在 MoveIt! 中,接口执行的操作信息被发送到控制器,接收到它的控制器将操作机器人的控制输入发送给机器人。管理器必须向 MoveIt! 注册接口,以便接口能够向控制器发送有关要采取的操作的信息。
-
在下文中,我们将仔细研究管理器、界面和控制器的每个元素。
管理器:
- MoveIt 提供了两个管理器!默认情况下:
MoveItFakeControllerManager
MoveItSimpleControllerManager-
MoveItFakeControllerManager 是模拟中使用的管理器,在使用 RViz 可视化操作时使用。
-
MoveItSimpleControllerManager支持两个接口,FollowJointTrajectory和GripperCommand,可用于实际控制机器人。
-
管理器controller_list使用 MoveIt 注册参数中指定的接口!
-
同时,还给出了要控制的关节等信息,根据这些信息控制机器 人。
-
有关参数,请参阅低级控制器。
-
此外,moveit_controller_manager可以通过更改值来指定要使用的管理器。
接口:
- MoveIt! 默认提供以下两个接口。 .
FollowJointTrajectory 接口
控制手臂或机器人本身
GripperCommand 接口
夹爪控制- 分别使用FollowJointTrajectory操作和GripperCommand操作
控制器:
-
如果要使用 MoveItSimpleControllerManager,则必须自己实现控制器。
-
如上所述,FollowJointTrajectory 接口使用FollowJointTrajectory 动作,GripperCommand 使用GripperCommand 动作,因此如果要使用这些接口,则需要实现合适的动作服务器。
-
有关动作服务器的实现,请参阅actionlib 教程
ros_control:
- ros_control有多个插件用于关节速度控制、力控制、位置控制等。
- 对于 ros_control,以下链接会有所帮助。
- 教程:ROS 控制
- Controller和Hardware Interface之间的处理机制(一、机器人模型的定义和注册)
- Controller与硬件接口的处理机制(二、关于RobotHWSim插件)
- Controller与硬件接口的处理机制(三、关于Controller)
- 操作实际机器时的规格 · 第 46 期 · Nishida-Lab / motoman_project
应用配置:
- 本次使用的整个应用的配置如下
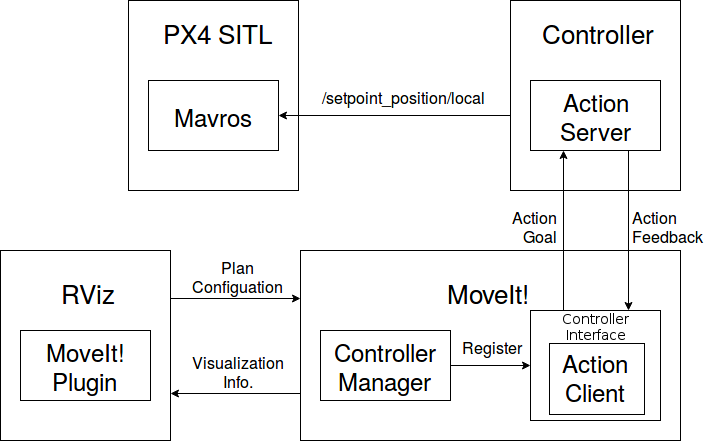
- 设置运动计划的 RViz 和模拟无人机的 PX4 SITL 模拟器被添加到上述基本配置中。
- 在此配置中,控制器接收有关通过 ROS 操作生成的行为的信息,/mavros/setpoint_position/local并通过将生成的航点发布到主题来控制无人机。
- 正如我们在尝试 MoveIt! 的 Rviz 演示中看到的那样,RViz将路线设置发送到 MoveIt! 端,并根据 MoveIt! 生成的路线信息对其进行可视化。
管理器:
-
MoveItSimpleControllerManager 只支持FollowJointTrajectory 接口和GripperCommand 接口,FollowJointTrajectory 接口不能用于控制多自由度关节,需要新建一个管理器。
-
这次我们将创建一个名为 MoveItMultiDOFControllerManager 的新管理器。
-
有关代码的更多信息,请参阅代码说明(管理器)。
-
moveit_multi_dof_controller_manager.cpp代码如下:
/**
* @file moveit_multi_dof_controller_manager.cpp
* @brief Controller manager for multi DOF joint
*/
#include <ros/ros.h>
#include <moveit/controller_manager/controller_manager.h>
#include <dronedoc/follow_multi_dof_joint_trajectory_controller_handle.hpp>
#include <sensor_msgs/JointState.h>
#include <pluginlib/class_list_macros.hpp>
namespace dronedoc
{
class MoveItMultiDOFControllerManager : public moveit_controller_manager::MoveItControllerManager
{
public:
/**
* @brief Default constructor
*/
MoveItMultiDOFControllerManager() : node_handle_("~")
{
// Error if controller_list param is not set
if (!node_handle_.hasParam("controller_list"))
{
ROS_ERROR_STREAM_NAMED("manager", "No controller_list specified.");
return;
}
XmlRpc::XmlRpcValue controller_list;
node_handle_.getParam("controller_list", controller_list);
// Error if controller_list is not an array
if (controller_list.getType() != XmlRpc::XmlRpcValue::TypeArray)
{
ROS_ERROR("Parameter controller_list should be specified as an array");
return;
}
// Error if multiple controller is defined
if(controller_list.size() > 1)
{
ROS_ERROR("This controller manager expects only one controller.");
return;
}
// Error if controller not have required fields
if (!controller_list[0].hasMember("name") || !controller_list[0].hasMember("joints"))
{
ROS_ERROR_STREAM_NAMED("manager", "Name and joints must be specifed for each controller");
return;
}
try
{
std::string name = std::string(controller_list[0]["name"]);
std::string action_ns;
// Warn if controller has "ns" field
if (controller_list[0].hasMember("ns"))
{
action_ns = std::string(controller_list[0]["ns"]);
ROS_WARN_NAMED("manager", "Use of 'ns' is deprecated, use 'action_ns' instead.");
} // Set action namespace
else if (controller_list[0].hasMember("action_ns"))
action_ns = std::string(controller_list[0]["action_ns"]);
else // Warn if "action_ns" not specified
ROS_WARN_NAMED("manager", "Please note that 'action_ns' no longer has a default value.");
// Error if "joints" field is not array
if (controller_list[0]["joints"].getType() != XmlRpc::XmlRpcValue::TypeArray)
{
ROS_ERROR_STREAM_NAMED("manager", "The list of joints for controller " << name
<< " is not specified as an array");
return;
}
// Error if controller not have "type" field
if (!controller_list[0].hasMember("type"))
{
ROS_ERROR_STREAM_NAMED("manager", "No type specified for controller " << name);
return;
}
std::string type = std::string(controller_list[0]["type"]);
// Set controller handle if "type" is FollowMultiDOFJointTrajectory
moveit_simple_controller_manager::ActionBasedControllerHandleBasePtr new_handle;
if (type == "FollowMultiDOFJointTrajectory")
{
new_handle.reset(new FollowMultiDOFJointTrajectoryControllerHandle(name, action_ns));
if (static_cast<FollowMultiDOFJointTrajectoryControllerHandle*>(new_handle.get())->isConnected())
{
ROS_INFO_STREAM_NAMED("manager", "Added FollowJointTrajectory controller for " << name);
controller_ = new_handle;
}
}
else
{
ROS_ERROR_STREAM_NAMED("manager", "Unknown controller type: " << type.c_str());
return;
}
/* add list of joints, used by controller manager and MoveIt! */
for (int i = 0; i < controller_list[0]["joints"].size(); ++i)
controller_->addJoint(std::string(controller_list[0]["joints"][i]));
}
catch (...)
{
ROS_ERROR_STREAM_NAMED("manager", "Caught unknown exception while parsing controller information");
}
}
/**
* @brief Destructor
*/
~MoveItMultiDOFControllerManager() override
{
}
/**
* @brief Returns pointer to controller handle
* @param name
*/
moveit_controller_manager::MoveItControllerHandlePtr getControllerHandle(const std::string& name) override
{
return static_cast<moveit_controller_manager::MoveItControllerHandlePtr>(controller_);
}
/**
* @brief Add FollowMultiDOFJointTrajectory to controller list
* @param names
*
* This manager only deals FollowMultiDOFJointTrajectory controller
*/
void getControllersList(std::vector<std::string>& names) override
{
names.push_back("FollowMultiDOFJointTrajectory");
}
/**
* @brief Get all controllers
* @param names
*
* This plugin assumes that all controllers are already active -- and if they are not, well, it has no way to deal
* with it anyways!
*/
void getActiveControllers(std::vector<std::string>& names) override
{
getControllersList(names);
}
/**
* @brief Get all controllers
* @param names
*
* Controller must be loaded to be active, see comment above about active controllers...
*/
virtual void getLoadedControllers(std::vector<std::string>& names)
{
getControllersList(names);
}
/**
* @brief Get the list of joints that a controller can control.
* @param name Controller name
* @param joints List of joints
*/
void getControllerJoints(const std::string& name, std::vector<std::string>& joints) override
{
if (name == "FollowMultiDOFJointTrajectory")
{
controller_->getJoints(joints);
}
else
{
ROS_WARN_NAMED("manager", "The joints for controller '%s' are not known. Perhaps the controller configuration is "
"not loaded on the param server?",
name.c_str());
joints.clear();
}
}
/**
* @brief Get state of controller specified by name
* @param name
*
* Controllers are all active and default.
*/
moveit_controller_manager::MoveItControllerManager::ControllerState
getControllerState(const std::string& name) override
{
moveit_controller_manager::MoveItControllerManager::ControllerState state;
state.active_ = true;
state.default_ = true;
return state;
}
/**
* @brief Switch controllers
* @param activate
* @param deactivate
*
* Cannot switch our controllers
*/
bool switchControllers(const std::vector<std::string>& activate, const std::vector<std::string>& deactivate) override
{
return false;
}
protected:
ros::NodeHandle node_handle_;
moveit_simple_controller_manager::ActionBasedControllerHandleBasePtr controller_;
};
} // end namespace dronedoc
PLUGINLIB_EXPORT_CLASS(dronedoc::MoveItMultiDOFControllerManager,
moveit_controller_manager::MoveItControllerManager);接口:
-
如上所述,FollowJointTrajectory 不能用于控制其他自由度的关节,因此我们将为其他自由度的关节创建一个新的 FollowMultiDOFJointTrajectory 接口。
-
将接口保存在 include / <package_name> 目录中,而不是 src 目录中。
-
请根据您的环境更改 <package_name> 部分。
-
有关代码的更多信息,请参阅代码说明(接口)。
-
follow_multi_dof_joint_trajectory_controller_handle.hpp代码如下:
/**
* @file follow_multi_dof_joint_trajectory_controller_handle.cpp
* @brief Action client for ExecuteTrajectory action
*/
#ifndef MOVEIT_PLUGINS_FOLLOW_MULTI_DOF_TRAJECTORY_CONTROLLER_HANDLE
#define MOVEIT_PLUGINS_FOLLOW_MULTI_DOF_TRAJECTORY_CONTROLLER_HANDLE
#include <moveit_simple_controller_manager/action_based_controller_handle.h>
#include <moveit_msgs/ExecuteTrajectoryAction.h>
namespace dronedoc
{
/**
* @brief Controller for multi DOF joint trajectory
*
* This is generally used for arms, but could also be used for multi-dof hands,
* or anything using a control_mgs/FollowJointTrajectoryAction.
*/
class FollowMultiDOFJointTrajectoryControllerHandle
: public moveit_simple_controller_manager::ActionBasedControllerHandle<moveit_msgs::ExecuteTrajectoryAction>
{
public:
/**
* @brief Constructor
* @param name
* @param action_ns
*/
FollowMultiDOFJointTrajectoryControllerHandle(const std::string& name, const std::string& action_ns)
: ActionBasedControllerHandle<moveit_msgs::ExecuteTrajectoryAction>(name, action_ns)
{
}
/**
* @brief Send ExecuteTrajectoryGoal message to action server
* @param trajectory Trajectory to follow
*/
bool sendTrajectory(const moveit_msgs::RobotTrajectory& trajectory) override
{
ROS_DEBUG_STREAM_NAMED("FollowMultiDOFJointTrajectoryController", "new trajectory to " << name_);
if (!controller_action_client_)
return false;
if (!trajectory.joint_trajectory.points.empty())
{
ROS_WARN_NAMED("FollowMultiDOFJointTrajectoryController", "%s cannot execute trajectories(trajectory_msgs/JointTrajectory).", name_.c_str());
}
if (done_)
ROS_DEBUG_STREAM_NAMED("FollowMultiDOFJointTrajectoryController", "sending trajectory to " << name_);
else
ROS_DEBUG_STREAM_NAMED("FollowMultiDOFJointTrajectoryController",
"sending continuation for the currently executed trajectory to " << name_);
// Send ExecuteTrajectoryGoal message
moveit_msgs::ExecuteTrajectoryGoal goal;
goal.trajectory = trajectory;
controller_action_client_->sendGoal(
goal, boost::bind(&FollowMultiDOFJointTrajectoryControllerHandle::controllerDoneCallback, this, _1, _2),
boost::bind(&FollowMultiDOFJointTrajectoryControllerHandle::controllerActiveCallback, this),
boost::bind(&FollowMultiDOFJointTrajectoryControllerHandle::controllerFeedbackCallback, this, _1));
done_ = false;
last_exec_ = moveit_controller_manager::ExecutionStatus::RUNNING;
return true;
}
/**
* @brief Cancel trajecotry execution
*/
bool cancelExecution() override
{
// do whatever is needed to cancel execution
return true;
}
/**
* @brief Wait trajectory execution
* @param duration
*/
bool waitForExecution(const ros::Duration& duration) override
{
// wait for the current execution to finish
return true;
}
protected:
/**
* @brief Called when server complete action
* @param state
* @param result
*/
void controllerDoneCallback(const actionlib::SimpleClientGoalState& state,
const moveit_msgs::ExecuteTrajectoryResultConstPtr& result)
{
// Output custom error message for FollowJointTrajectoryResult if necessary
if (result)
{
if(result->error_code.val == moveit_msgs::MoveItErrorCodes::SUCCESS)
{
ROS_INFO_NAMED("FollowMultiDOFTrajectoryContoller", "Execution Succeeded.");
}
else
{
ROS_ERROR("Returned Error Code %d", result->error_code.val);
ROS_ERROR("For Detailse of Error Code, see moveit_msgs/MoveItErrorCodes.msg");
}
}
else
{
ROS_WARN_STREAM("Controller " << name_ << ": no result returned");
}
finishControllerExecution(state);
}
/**
* @brief Called when goal become active
*/
void controllerActiveCallback()
{
ROS_DEBUG_STREAM_NAMED("FollowMultiDOFJointTrajectoryController", name_ << " started execution");
}
/**
* @brief Called when feedback arrived from server
* @param feedback
*/
void controllerFeedbackCallback(const moveit_msgs::ExecuteTrajectoryFeedbackConstPtr& feedback)
{
}
};
} // end namespace dronedoc
#endif // MOVEIT_PLUGINS_FOLLOW_MULTI_DOF_TRAJECTORY_CONTROLLER_HANDLE控制器:
-
这一次,FollowMultiDOFJointTrajectory我们将使用一个节点作为控制器,接收动作的目标并将其发送给无人机作为目标位置。
-
有关代码的更多信息,请参阅代码说明(控制器)
-
drone_controller.cpp代码如下:
/**
* @file drone_controller.cpp
* @brief PX4 based UAV controller for moveit
*/
#include <vector>
#include <array>
#include <string>
#include <cmath>
#include <ros/ros.h>
#include <geometry_msgs/Transform.h>
#include <geometry_msgs/PoseStamped.h>
#include <moveit_msgs/ExecuteTrajectoryAction.h>
#include <moveit_msgs/RobotTrajectory.h>
#include <mavros_msgs/State.h>
#include <trajectory_msgs/MultiDOFJointTrajectory.h>
#include <trajectory_msgs/MultiDOFJointTrajectoryPoint.h>
#include <actionlib/server/simple_action_server.h>
class DroneController{
private:
ros::NodeHandle nh_;
//! Action name of ExecuteTrajectory
std::string action_name_;
//! Server of ExecuteTrajectoryAction
actionlib::SimpleActionServer<moveit_msgs::ExecuteTrajectoryAction> as_;
//! Feedback message of ExecuteTrajectoryAction
moveit_msgs::ExecuteTrajectoryFeedback feedback_;
//! Result message of ExecuteTrajectoryAction
moveit_msgs::ExecuteTrajectoryResult result_;
//! Position command publisher
ros::Publisher cmd_pos_pub_;
//! Subscriber of local position
ros::Subscriber local_pos_sub_;
//! Subscriber of UAV state
ros::Subscriber state_sub_;
//! Current pose of UAV
geometry_msgs::PoseStamped current_pose_;
//! Current state of UAV
mavros_msgs::State current_state_;
public:
/**
* @brief Constructor
* @param action_name Action name
*/
DroneController(std::string action_name) :
action_name_(action_name),
as_(nh_, action_name, boost::bind(&DroneController::executeCb, this, _1), false)
{
as_.start();
// Position command publisher setup
std::string cmd_pos_topic;
nh_.param<std::string>("mavros_setpoint_topic", cmd_pos_topic, "/mavros/setpoint_position/local");
cmd_pos_pub_ = nh_.advertise<geometry_msgs::PoseStamped>(cmd_pos_topic, 10);
// Local position subscriber setup
std::string local_pos_topic;
nh_.param<std::string>("mavros_localpos_topic", local_pos_topic, "/mavros/local_position/pose");
auto local_pos_cb = boost::bind(&DroneController::localPosCb, this, _1);
local_pos_sub_ = nh_.subscribe<geometry_msgs::PoseStamped>(local_pos_topic, 10, local_pos_cb);
// UAV state subscriber setup
std::string state_topic;
nh_.param<std::string>("mavros_state_topic", state_topic, "/mavros/state");
auto state_cb = boost::bind(&DroneController::stateCb, this, _1);
state_sub_ = nh_.subscribe<mavros_msgs::State>(state_topic, 10, state_cb);
ROS_INFO("Action server initialized.");
};
/**
* @brief Destructor
*/
~DroneController()
{
};
private:
/**
* @brief Callback of ExecuteTrajectory action
* @param goal Goal of ExecuteTrajectory action
*/
void executeCb(const moveit_msgs::ExecuteTrajectoryGoalConstPtr &goal)
{
ROS_INFO("Action received.");
ros::Rate rate(20);
std::vector<trajectory_msgs::MultiDOFJointTrajectoryPoint> trajectory;
trajectory = goal->trajectory.multi_dof_joint_trajectory.points;
// Wait for connection
ROS_INFO("Waiting for FCU connection...");
while (ros::ok() and not current_state_.connected)
{
ros::spinOnce();
rate.sleep();
}
ROS_INFO("FCU connection established.");
// Position command need to be published to switch mode to OFFBOARD
for(int i=0; i<10; ++i)
{
cmd_pos_pub_.publish(getPoseFromTrajectory(trajectory.front()));
}
for(int i=0; i < trajectory.size()-1; ++i)
{
ROS_INFO("Moving to waypoint No. %d", i);
// Send feedback (progress of path)
feedback_.state = std::to_string(i);
as_.publishFeedback(feedback_);
// Get PoseStamped message from MultiDOFJointTrajectoryPoint
geometry_msgs::PoseStamped start = getPoseFromTrajectory(trajectory.at(i));
geometry_msgs::PoseStamped goal = getPoseFromTrajectory(trajectory.at(i+1));
// Get interpolated path from two waypoints
std::vector<geometry_msgs::PoseStamped> path = getBilinearPath(start, goal);
// Publish all interpolated points
for(auto pose: path)
{
// Publish same message till drone arrives to local goal
while(not isGoalReached(pose) and not as_.isPreemptRequested())
{
cmd_pos_pub_.publish(pose);
ros::spinOnce();
rate.sleep();
}
// Exit loop if new action arrived
if(as_.isPreemptRequested() or not ros::ok())
{
result_.error_code.val = moveit_msgs::MoveItErrorCodes::PREEMPTED;
as_.setPreempted();
ROS_INFO("Action preempted.");
break;
}
}
// Exit loop if new action arrived
if(as_.isPreemptRequested() or not ros::ok())
{
result_.error_code.val = moveit_msgs::MoveItErrorCodes::PREEMPTED;
as_.setPreempted();
ROS_INFO("Action preempted.");
break;
}
rate.sleep();
}
// Success
result_.error_code.val = moveit_msgs::MoveItErrorCodes::SUCCESS;
as_.setSucceeded(result_);
ROS_INFO("Action completed.");
}
/**
* @brief Return interpolated path using bilinear interpolation from two waypoints
* @param start Start waypoint
* @param goal Goal waypoint
* @param step Step size of interpolation
* @return Vector of interpolated path
*/
std::vector<geometry_msgs::PoseStamped> getBilinearPath(const geometry_msgs::PoseStamped &start,
const geometry_msgs::PoseStamped &goal,
const double step=0.05)
{
std::vector<geometry_msgs::PoseStamped> bilinear_path;
// Store x-y and x-z coordinates of start point
std::array<double, 2> start_xy = {start.pose.position.x, start.pose.position.y};
std::array<double, 2> start_xz = {start.pose.position.x, start.pose.position.z};
// Store x-y and x-z coordinates of goal point
std::array<double, 2> goal_xy = {goal.pose.position.x, goal.pose.position.y};
std::array<double, 2> goal_xz = {goal.pose.position.x, goal.pose.position.z};
// x-y and x-z coordinates of interpolated points
std::array<std::vector<double>, 2> points_xy = linearInterp(start_xy, goal_xy, step);
std::array<std::vector<double>, 2> points_xz = linearInterp(start_xz, goal_xz, step);
// Number of generated points by interpolation
int num_points = points_xy.at(0).size();
try
{
// Generate PoseStamped message from std::array
for(int i=0; i<num_points; ++i)
{
geometry_msgs::PoseStamped pose;
pose.pose.orientation = start.pose.orientation;
pose.pose.position.x = points_xy.front().at(i);
pose.pose.position.y = points_xy.back().at(i);
pose.pose.position.z = points_xz.back().at(i);
bilinear_path.push_back(pose);
}
}
catch (std::out_of_range &ex)
{
ROS_ERROR("%s", ex.what());
}
return bilinear_path;
}
/**
* @brief Perform linear interpolation
* @param p1 First point
* @param p2 Second point
* @param step Step size of interpolation
* @return Array of interpolated points in the shape of [x-points, y-points]
*/
std::array<std::vector<double>, 2> linearInterp(const std::array<double, 2> &p1,
const std::array<double, 2> &p2, const double step)
{
// Gradient
double a = (p1.at(1) - p2.at(1)) / (p1.at(0) - p2.at(0));
// Intercept
double b = p1.at(1) - a*p1.at(0);
// Number of steps
int num_steps = std::floor((p2.at(0) - p1.at(0))/step);
// Initialize container for interpolated points
std::vector<double> points_x(num_steps+1);
// Set interpolated points
points_x.front() = p1.at(0);
for(int i=1; i<num_steps; ++i)
{
points_x.at(i) = step * i + p1.at(0);
}
points_x.back() = p2.at(0);
// Initialize container for interpolated points
std::vector<double> points_y(num_steps+1);
// Set interpolated points
points_y.front() = p1.at(1);
for(int i=1; i<num_steps; ++i)
{
points_y.at(i) = a*(p1.at(0) + i*step) + b;
}
points_y.back() = p2.at(1);
// Initialize container for vector of points
std::array<std::vector<double>, 2> points;
points.front() = points_x;
points.back() = points_y;
return points;
}
/**
* @brief Convert MultiDOFJointTrajectoryPoint message to PoseStamped message
* @param trajectory_pt MultiDOFJointTrajectoryPoint message
* @return Pose converted from Trajectory msg
*/
geometry_msgs::PoseStamped getPoseFromTrajectory(const trajectory_msgs::MultiDOFJointTrajectoryPoint &trajectory_pt)
{
geometry_msgs::PoseStamped pose;
pose.header.stamp = ros::Time::now();
pose.pose.position.x = trajectory_pt.transforms.front().translation.x;
pose.pose.position.y = trajectory_pt.transforms.front().translation.y;
pose.pose.position.z = trajectory_pt.transforms.front().translation.z;
pose.pose.orientation = trajectory_pt.transforms.front().rotation;
return pose;
}
/**
* @brief Returns true if drone is reached goal
* @param goal
* @param tolerance Consider drone reached goal if drone is within the circle with diameter of this value
* @return True if drone is reched goal, false if else
*/
inline bool isGoalReached(const geometry_msgs::PoseStamped &goal, const double tolerance=0.1)
{
double error = std::sqrt(std::pow(goal.pose.position.x - current_pose_.pose.position.x, 2)
+ std::pow(goal.pose.position.y - current_pose_.pose.position.y, 2)
+ std::pow(goal.pose.position.z - current_pose_.pose.position.z, 2));
return error < tolerance ? true : false;
}
/**
* @brief Callback for local position subscriber
* @msg Incoming message
*/
void localPosCb(const geometry_msgs::PoseStamped::ConstPtr &msg)
{
current_pose_ = *msg;
}
/**
* @brief Callback for state subscriber
* @msg Incoming message
*/
void stateCb(const mavros_msgs::State::ConstPtr &msg)
{
current_state_ = *msg;
}
};
int main(int argv, char **argc)
{
ros::init(argv, argc, "drone_controller");
DroneController controller("iris_group_controller/follow_multi_dof_joint_trajectory");
ros::spin();
return 0;
}CMakeLists.txt:
- find_package 添加要使用的包
find_package(catkin REQUIRED COMPONENTS
...
actionlib
trajectory_msgs
pluginlib
moveit_msgs
moveit_core
)- 指定包含目录,以便您可以包含控制器接口
catkin_package(
INCLUDE_DIRS include
...
)- 添加以下内容以编译控制器管理器并链接库。控制器管理器是一个库,而不是一个节点,所以add_library使用
- 为库名添加前缀,使其不会与其他包中的库名重复${PROJECT_NAME}_。
- 由于这次的项目名称是这样,您可以dronedoc通过这样做libdronedoc_moveit_multi_dof_controller_manager来创建一个名为的库
add_library(${PROJECT_NAME}_moveit_multi_dof_controller_manager src/moveit_multi_dof_controller_manager.cpp)
target_link_libraries(${PROJECT_NAME}_moveit_multi_dof_controller_manager ${catkin_LIBRARIES} ${Boost_LIBRARIES})- 添加以下内容以编译控制器并链接库
add_executable(drone_controller src/drone_controller.cpp)
target_link_libraries(drone_controller ${catkin_LIBRARIES})插件信息文件:
- 创建一个描述插件信息的文件,以便插件加载器可以找到插件
- moveit_multi_dof_controller_manager_plugin_description.xml
<library path="libdronedoc_moveit_multi_dof_controller_manager">
<class name="dronedoc/MoveItMultiDOFControllerManager"
type="dronedoc::MoveItMultiDOFControllerManager"
base_class_type="moveit_controller_manager::MoveItControllerManager">
<description>
</description>
</class>
</library>- 每个标签和字段的含义如下。
path
库路径。库名称是将名称添加到CMakeLists.txt 中add_library指定名称开头的名称lib(在本例中为libdronedoc_moveit_multi_dof_controller_manager)。
type
插件的型号名称。必须从命名空间中指定。
base_class
插件基类的模型名称。必须从命名空间中指定。
name
插件名称
description
插件说明package.xml:
- 由于我们使用的是 pluginlib,因此将 pluginlib 添加到 package.xml 中的依赖包中
<depend>pluginlib</depend>- 它还
导出标签内的插件。 moveit_core该部分指定了插件基类所在的包名。 - 这次moveit_core,MoveItSimpleControllerManager是在包中定义的,所以指定这个
<export>
<moveit_core plugin="${prefix}/moveit_multi_dof_controller_manager_plugin_description.xml"/>
</export>- 要检查插件是否已注册rospack,请在构建包后使用以下命令
rospack plugins --attrib=plugin moveit_core启动文件:
- 创建并编辑一些 Launch 文件以运行您目前构建的应用程序
- iris_moveit.launch 启动模拟环境(Gazebo + PX4 SITL + MAVROS)、MoveIt! 节点和控制器
- iris_moveit.launch内容如下:
<launch>
<!-- robot description for px4 sitl -->
<arg name="model_sitl" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro_sitl/urdf/iris_base.xacro" />
<arg name="mavlink_udp_port" default="14560"/>
<arg name="rotors_description_dir_sitl" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro_sitl" />
<arg name="cmd_sitl" default="$(find xacro)/xacro $(arg model_sitl) rotors_description_dir:=$(arg rotors_description_dir_sitl) mavlink_udp_port:=$(arg mavlink_udp_port) --inorder"/>
<param command="$(arg cmd_sitl)" name="robot_description_sitl" />
<!-- robot description for moveit -->
<arg name="model" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro/urdf/iris_base.xacro" />
<arg name="rotors_description_dir" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro" />
<arg name="cmd" default="$(find xacro)/xacro $(arg model) rotors_description_dir:=$(arg rotors_description_dir) mavlink_udp_port:=$(arg mavlink_udp_port) --inorder"/>
<param command="$(arg cmd)" name="robot_description" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- PX4 configs -->
<arg name="est" default="ekf2"/>
<arg name="vehicle" default="iris_2d_lidar"/>
<arg name="interactive" default="true"/>
<env name="PX4_SIM_MODEL" value="$(arg vehicle)" />
<env name="PX4_ESTIMATOR" value="$(arg est)" />
<!-- PX4 SITL and Gazebo -->
<arg unless="$(arg interactive)" name="px4_command_arg1" value="-d"/>
<arg if="$(arg interactive)" name="px4_command_arg1" value=""/>
<node name="sitl" pkg="px4" type="px4" output="screen"
args="$(find px4)/ROMFS/px4fmu_common -s etc/init.d-posix/rcS $(arg px4_command_arg1)" required="true"/>
<!-- Launching gazebo -->
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<arg name="gui" default="true"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="debug" value="$(arg debug)"/>
</include>
<!-- MAVROS -->
<arg name="fcu_url" default="udp://:14540@localhost:14557"/>
<arg name="gcs_url" default="" />
<arg name="respawn_mavros" default="false" />
<include file="$(find mavros)/launch/px4.launch">
<!-- GCS link is provided by SITL -->
<arg name="gcs_url" value=""/>
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="respawn_mavros" value="$(arg respawn_mavros)"/>
</include>
<!-- mavros -->
<param name="/mavros/local_position/tf/send" type="bool" value="true" />
<param name="/mavros/local_position/frame_id" type="str" value="base_link" />
<param name="/mavros/local_position/tf/frame_id" type="str" value="map" />
<!-- spawn robot -->
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="0"/>
<arg name="R" default="0"/>
<arg name="P" default="0"/>
<arg name="Y" default="0"/>
<node name="$(anon vehicle_spawn)" pkg="gazebo_ros" type="spawn_model" output="screen" args="-param robot_description_sitl -urdf -model $(arg vehicle) -package_to_model -x $(arg x) -y $(arg y) -z $(arg z) -R $(arg R) -P $(arg P) -Y $(arg Y)"/>
<!-- static tf from map to world which is base frame for planning -->
<node pkg="tf" name="map2world" type="static_transform_publisher" args="0 0 0 0 0 0 map world 100"/>
<!-- publish tf to supress warnings -->
<node pkg="tf" name="map2origin" type="static_transform_publisher" args="0 0 0 0 0 0 map local_origin 100"/>
<node pkg="tf" name="base2fcu" type="static_transform_publisher" args="0 0 0 0 0 0 base_link fcu 100"/>
<!-- Moveit -->
<include file="$(find iris_moveit_config)/launch/move_group.launch" >
<arg name="fake_execution" value="false" />
</include>
<node pkg="px4_sim_pkg" name="drone_controller" type="drone_controller" output="screen"/>
</launch>评论:
-
从 xacro 文件生成用于 PX4 SITL 模拟的 URDF。
-
如创建 iris_moveit_config 包中所述,PX4 SITL 模拟中使用的 xacro 文件和 MoveIt! 中使用的 xacro 文件不能相同,因此单独加载它们。
-
在创建 iris_moveit_config 包时,用package://rotors_description所有内容package://mavlink_sitl_gazebo/models/rotors_description/替换multirotor_base.xacro文件中的所有内容,但准备一个您没有在 xacro_sitl 目录中替换的模式并加载它
<arg name="model_sitl" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro_sitl/urdf/iris_base.xacro" />
<arg name="mavlink_udp_port" default="14560"/>
<arg name="rotors_description_dir_sitl" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro_sitl" />
<arg name="cmd_sitl" default="$(find xacro)/xacro $(arg model_sitl) rotors_description_dir:=$(arg rotors_description_dir_sitl) mavlink_udp_port:=$(arg mavlink_udp_port) --inorder"/>
<param command="$(arg cmd_sitl)" name="robot_description_sitl" />- 为 MoveIt 加载 URDF! 并使用joint_state_publisher 和robot_state_publisher 节点将机器人关节和框架的状态发布为TF。
<arg name="model" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro/urdf/iris_base.xacro" />
<arg name="rotors_description_dir" default="$(find px4_sim_pkg)/models/iris_depth_camera/xacro" />
<arg name="cmd" default="$(find xacro)/xacro $(arg model) rotors_description_dir:=$(arg rotors_description_dir) mavlink_udp_port:=$(arg mavlink_udp_port) --inorder"/>
<param command="$(arg cmd)" name="robot_description" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />- 设置为将 TF 发送到基本链接
<param name="/mavros/local_position/tf/send" type="bool" value="true" />
<param name="/mavros/local_position/frame_id" type="str" value="base_link" />
<param name="/mavros/local_position/tf/frame_id" type="str" value="map" />- iris_group 的 parent frame 是world因为我不得不定义了 TF map to world,以便您可以使用 TF world to base_link
<node pkg="tf" name="map2world" type="static_transform_publisher" args="0 0 0 0 0 0 map world 100"/>- 由于您将收到 TF 不可用的警告,请定义以下 TF 以防止出现警告。它不一定是。
<node pkg="tf" name="map2origin" type="static_transform_publisher" args="0 0 0 0 0 0 map local_origin 100"/>
<node pkg="tf" name="base2fcu" type="static_transform_publisher" args="0 0 0 0 0 0 base_link fcu 100"/>- 启动 MoveIt! 节点。由于命令发送到实际机器人,因此fake_execution设置为false
<include file="$(find iris_moveit_config)/launch/move_group.launch" >
<arg name="fake_execution" value="false" />
</include>管理器参数文件:
- iris_moveit_controller_manager.launch.xml 指定控制器管理器并加载参数。
- moveit_controller_manager更改参数以使用您创建的控制器管理器。
- 它还加载了下面描述的controllers.yaml 文件来加载控制器管理器的参数
- iris_moveit_controller_manager.launch.xml内容如下:
<launch>
<!-- Set the param that trajectory_execution_manager needs to find the controller plugin -->
<arg name="moveit_controller_manager" default="dronedoc/MoveItMultiDOFControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<!-- load controller_list -->
<rosparam file="$(find iris_moveit_config)/config/controllers.yaml"/>
</launch>控制器参数文件:
- 该文件描述了控制器管理器使用的参数。有关参数,请参阅低级控制器
- controllers.yaml内容:
controller_list:
- name: iris_group_controller
action_ns: follow_multi_dof_joint_trajectory
type: FollowMultiDOFJointTrajectory
default: true
joints:
- virtual_jointtrajectory_execution.launch.xml:
- trajectory_execution.launch.xml设置与动作执行相关的参数
- 如果当前位置与起始位置相距较远,则会发生错误且无法执行操作。
- 默认情况下,距离1cm就不能执行,所以trajectory_execution/allowed_start_tolerance改变参数的值,即使距离很远也能执行操作。
<param name="trajectory_execution/allowed_start_tolerance" value="0.1"/>- 此外,默认情况下,自操作开始执行后经过一定时间后,操作的执行会中断,因此请设置trajectory_execution/execution_duration_monitoring参数false以防止超时
<param name="trajectory_execution/execution_duration_monitoring" value="false" />测试:
- 启动模拟环境和 MoveIt! 节点
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4_sim_pkg iris_moveit.launch-
将无人机起飞,输入 commander takeoff
-
启动 RViz,其中包含用于路线规划的 MoveIt! 插件
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch iris_moveit_config moveit_rviz.launch config:=true-
将无人机起飞,配置好设置,点击“规划”选项卡中的“规划”,在RViz中显示生成的路径。
-
如果开始在起飞前位置,则将“计划”选项卡“查询”中的“选择开始状态”下拉菜单设置为“当前”,然后按“更新”按钮开始当前位置
-
按下“执行”按钮follow_multi_dof_joint_trajectory会将目标发送到动作服务器,动作服务器将开始通过 mavros 主题发送目标位置。
-
/mavros/setpoint_position/local将模式更改为 OFFBOARD 以使用主题消息控制无人机
rosrun mavros mavsys mode -c OFFBOARD- 如果无人机移动到如下图所示的目标位置,则成功。

- 如果有障碍物,它会生成一条路线来避开它

- 目前在规划路线时没有对滚转角或俯仰角的限制,因此可能会输出无人机无法采取的姿态。 setpoint_position/local在使用topic的控制中,只反映了偏航角,所以无人机的姿态不会变得异常,但是由于MoveIt产生的运动!不能忠实地执行,可以通过显示RViz来避免。你可能会撞到存在的障碍。 您可能想要使用移动组界面,它允许您限制路线
概括:
-
在本文中,我们通过将使用 MoveIt! 规划的路线的航点通过 mavros 发送到无人机来移动无人机。
-
这次我使用了线性插值来对生成的路径进行插值,并将其交给setpoint_position主题来控制无人机,但您可能想尝试使用waypoints来控制无人机的位置
参考:
-
##插件库相关
-
##移动组界面
-
这一次,我从 RViz 设置目标和计划器,但是有一个接口可以从 C++ 或 Python 代码设置这些。
-
##机械手控制
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号