



















PX4与仿真入门教程-dronedoc-试试 MoveIt! 的 Rviz 演示
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4与仿真入门教程-dronedoc-试试 MoveIt! 的 Rviz 演示
说明:
- 介绍使用创建的 iris_moveit_config 包中运行 Rviz 插件的演示。
步骤:
- 您可以使用以下命令启动演示节点。
cd ~/tools/dronedoc
source load_environment.sh
roslaunch iris_moveit_config demo.launch- 演示开始时,将显示以下窗口。
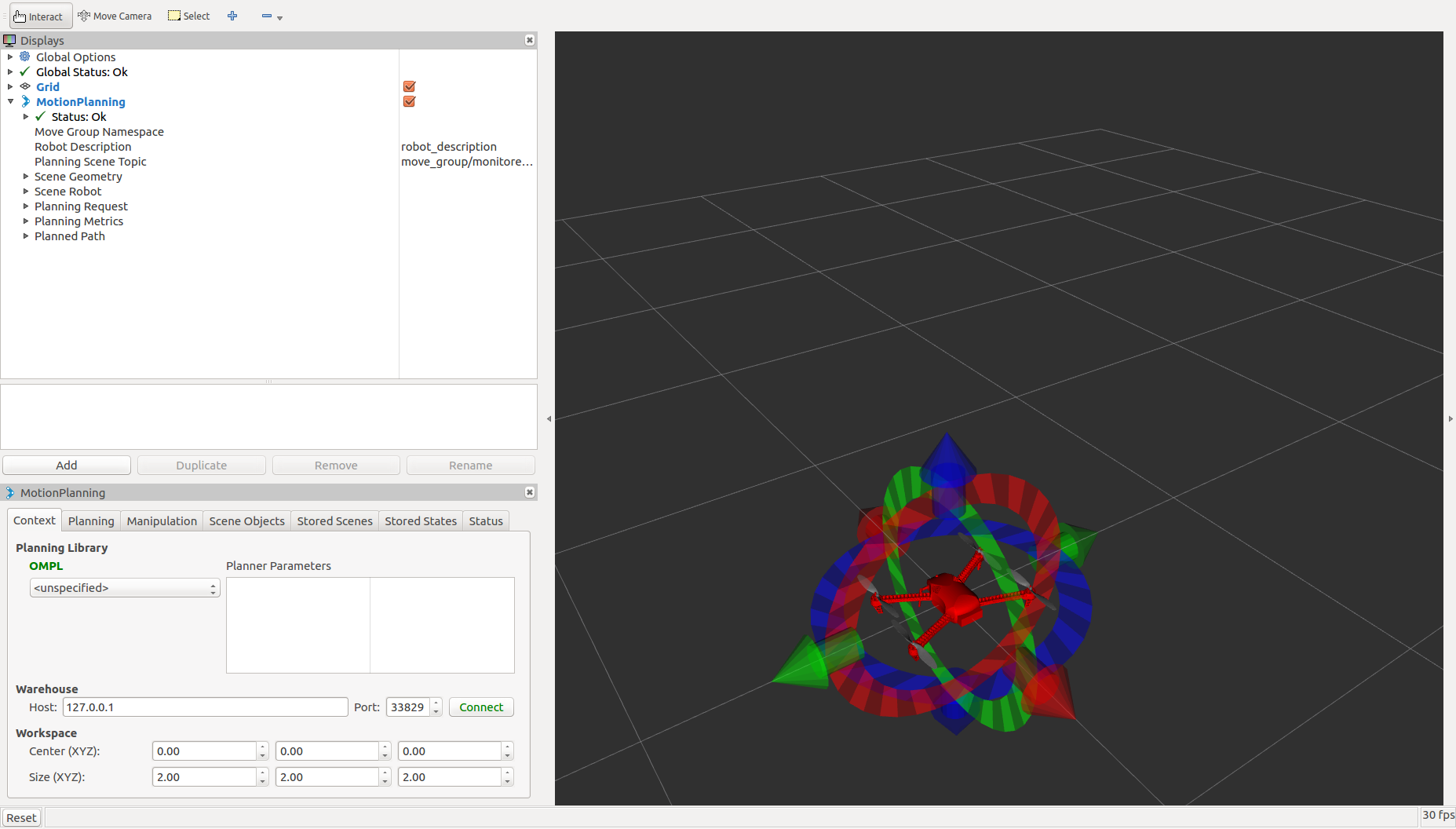
- 使用标记来指示无人机目标的位置和方向。
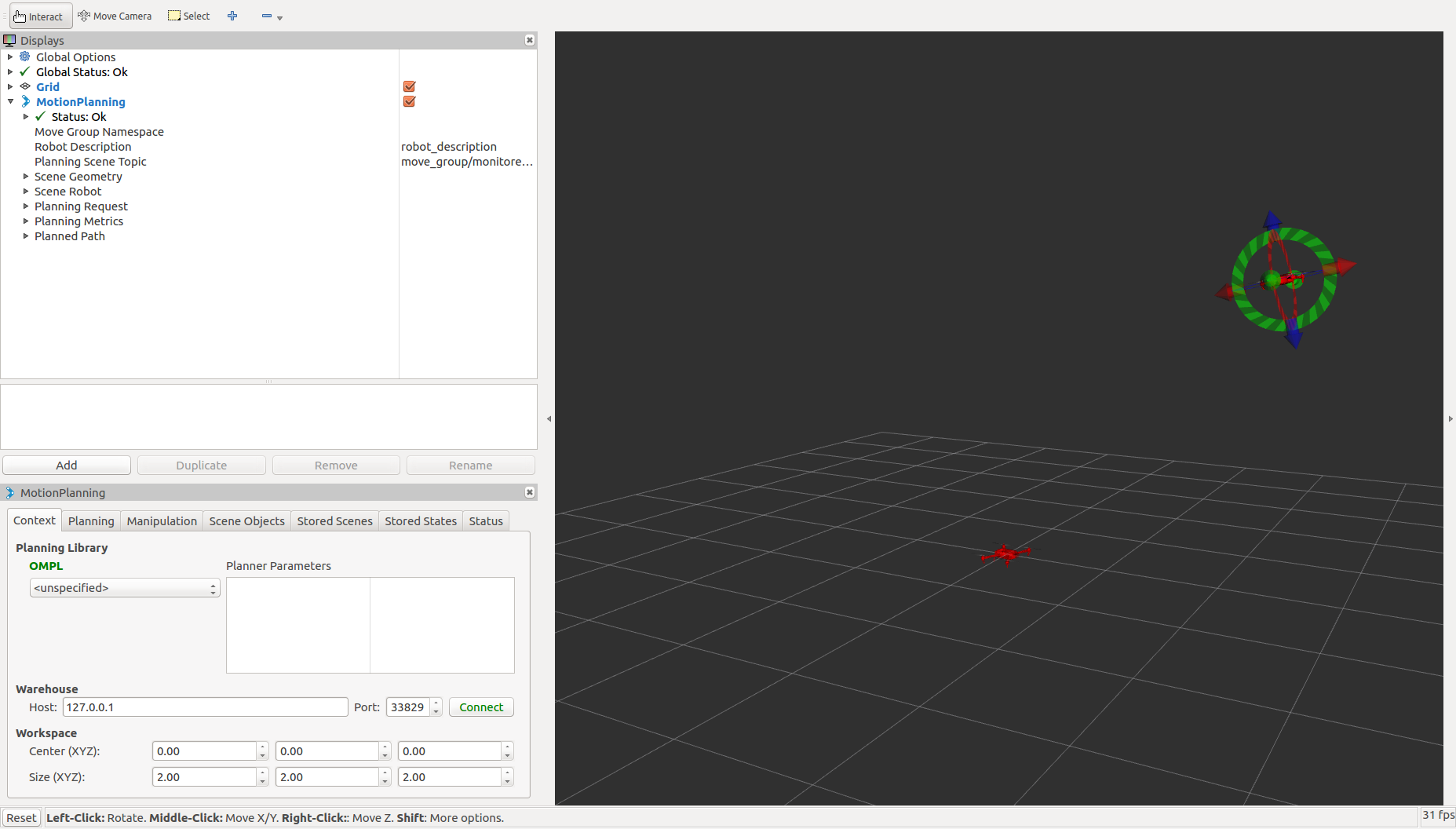
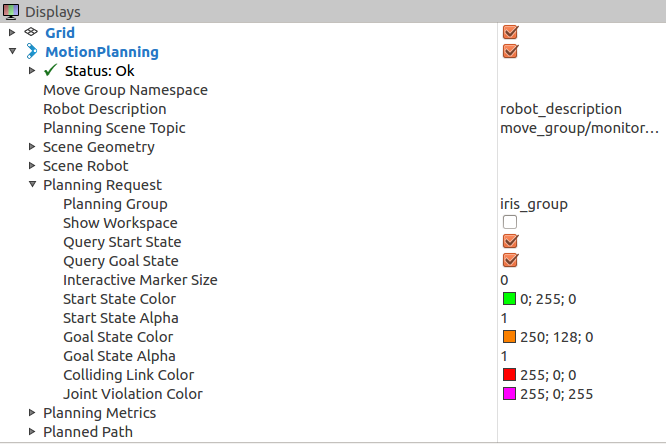
- 接下来,勾选“Motion Planning”->“Planning Request”下的“Query Start State”,指示开始位置和姿势。
- 将显示一个新标记,因此像以前一样选择开始位置。
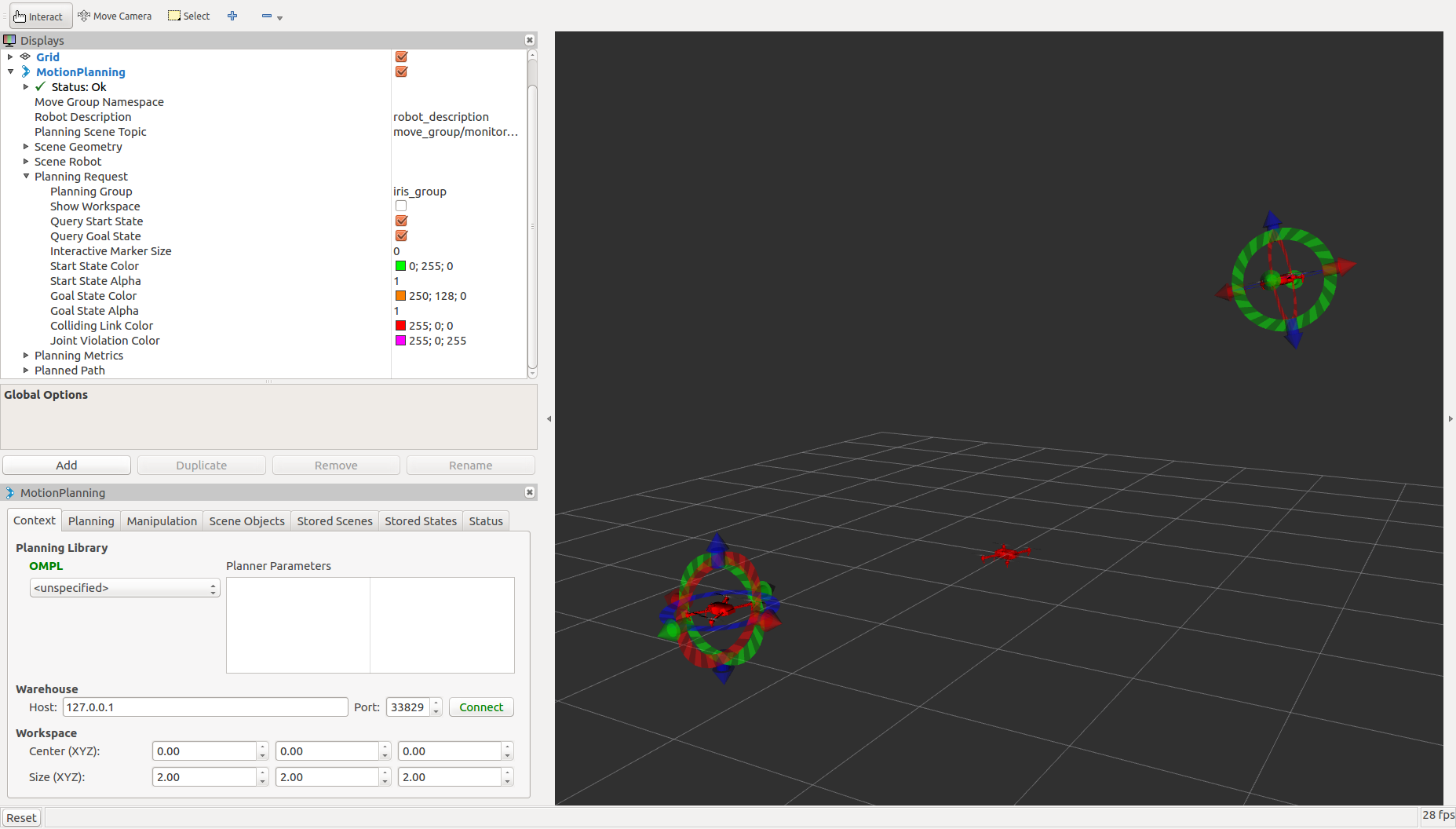
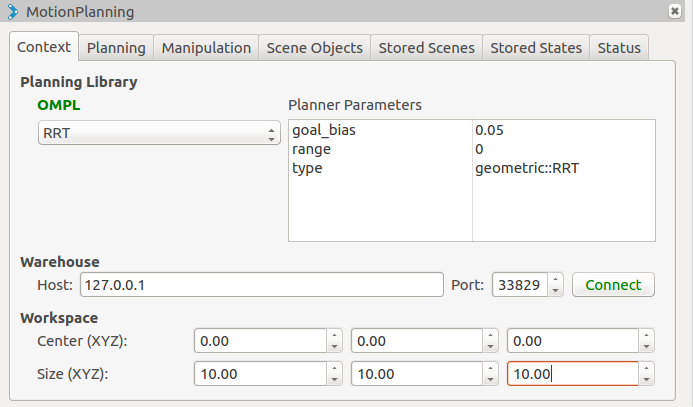
- 选择开始和目标位置后,从“运动规划”子窗口的“规划库”中设置规划器。
- 此外,从“工作区”,规划师调整路线规划区域的大小。
- 完成设置后,点击“规划”选项卡中的“规划”按钮开始路线规划。
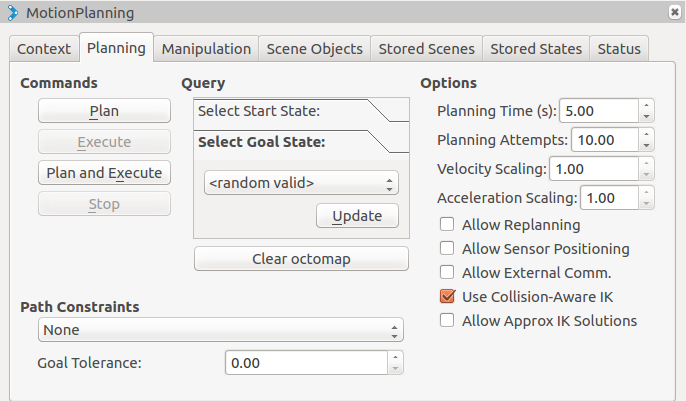
- 路线规划完成后,计算出的路线如下图所示。

- 下面是总结了一系列步骤的视频。

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号