



















Ailibot入门教程-校准-IMU校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Ailibot入门教程-校准-IMU校准
说明:
-
介绍如何在Ailibot上校准imu
-
Ailibot默认使用GY-85九轴陀螺仪
相关设备:
- Ailibot套件,采购地址
操作步骤
- [Remote PC] roscore
$ roscore- [Ailibot] 启动小车
$ roslaunch ailibot_bringup bringup.launch- [Ailibot] 开始校准imu,最终生成的配置文件默认保存在包
ailibot_bringup/param/imu/文件夹里
$ roslaunch ailibot_calib calibrate_imu.launch
......
Orient IMU with X+ axis - Front side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with X- axis - Rear side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Y+ axis - Left side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Y- axis - Right side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Z+ axis - Top side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Z- axis - Bottom side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Computing calibration parameters... Success!
Saving calibration file... Success!注:校准时需要根据终端上的提示来翻转小车;比如校准Y+方向的时候,将小车的左面朝上,z-方向就是底面朝上,等等,照此类推
- [Ailibot] 查看文件日期,检查是否生成新的
imu_calib.yaml配置文件
$ ll ~/ailibot_ws/src/ailibot/ailibot_bringup/param/imu/- [Ailibot] 中止
minimal.launch启动程序后再重新启动小车
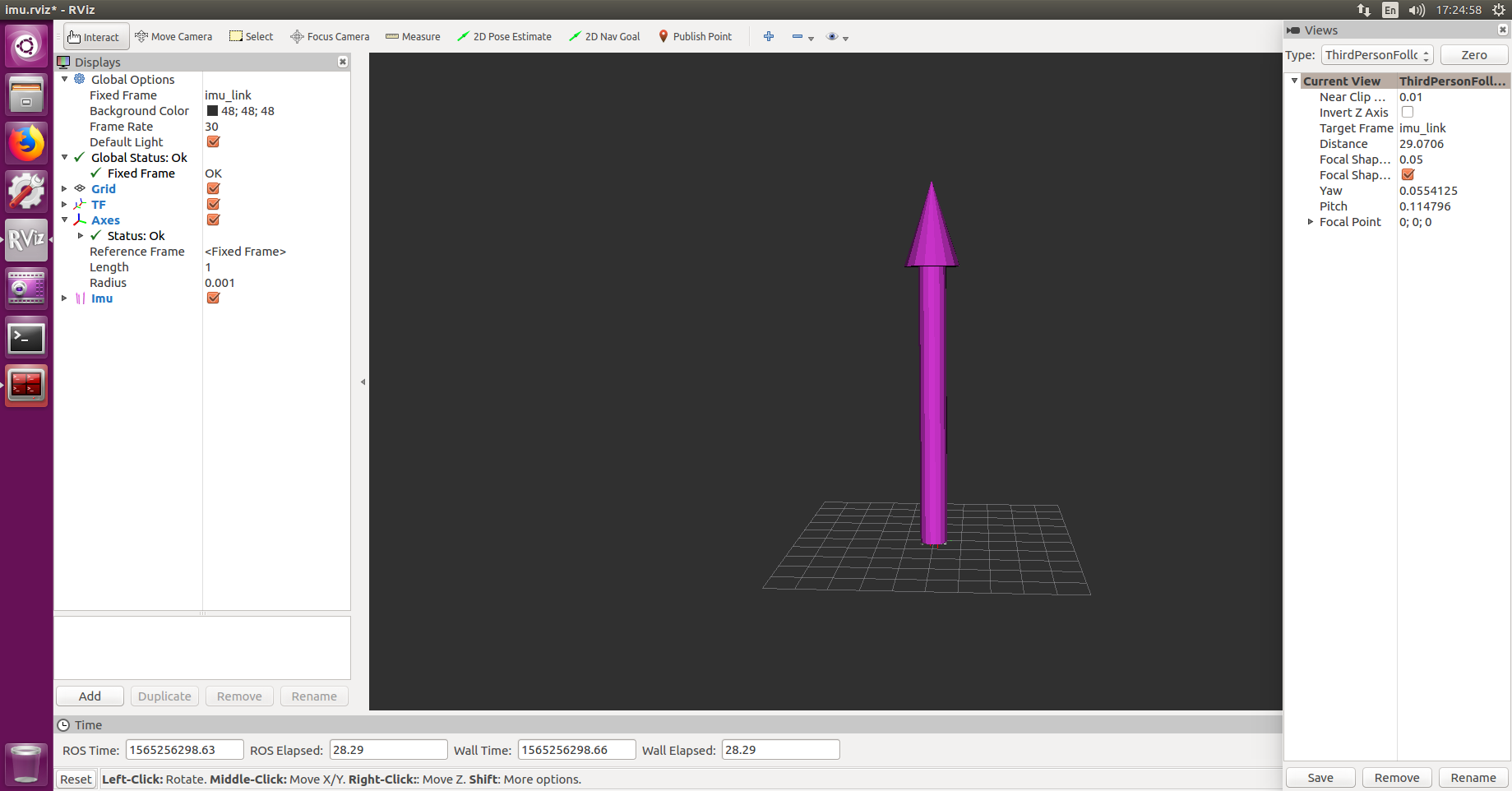
$ roslaunch ailibot_bringup bringup.launch- [Remote PC] 打开rviz查看imu数据
$ roslaunch ailibot_rviz view_imu.launch-
正常情况下,imu数据较为稳定,不会有大幅度偏移
-
效果如下:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=65736961&cid=114056875&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号