



















Ailibot入门教程-测试-测试雷达
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何在Ailibot上进行检测雷达能否正常运行
相关设备:
- Ailibot套件,采购地址
操作步骤
- [Remote PC] 运行roscore
$ roscore- [Ailibot] 启动雷达
$ roslaunch ailibot_bringup laser.launch- [Remote PC] 启动Rviz
$ roslaunch ailibot_rviz view_laser.launch --screen-
效果图如下:
-
查看/scan发布的频率
$ rostopic hz /scan
subscribed to [/scan]
average rate: 7.676
min: 0.128s max: 0.137s std dev: 0.00390s window: 8
average rate: 7.675
min: 0.126s max: 0.139s std dev: 0.00428s window: 15
average rate: 7.680
min: 0.111s max: 0.152s std dev: 0.00735s window: 23
average rate: 7.669
min: 0.109s max: 0.152s std dev: 0.00859s window: 31
average rate: 7.682
min: 0.109s max: 0.152s std dev: 0.00810s window: 38
average rate: 7.679
min: 0.109s max: 0.152s std dev: 0.00855s window: 46
average rate: 7.685
min: 0.109s max: 0.152s std dev: 0.00895s window: 54
average rate: 7.669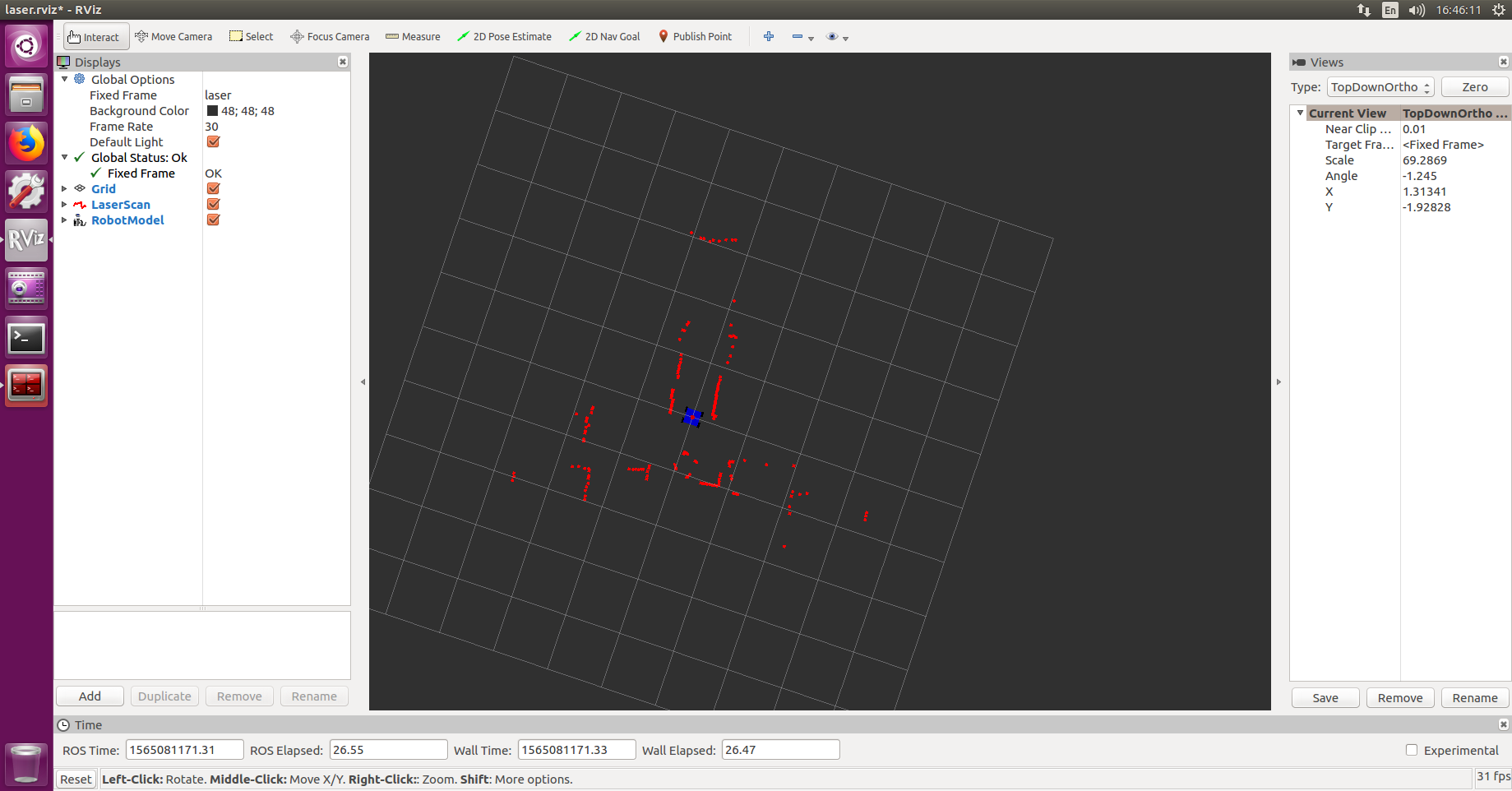
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=65736237&cid=114056488&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号