



















Ailibot入门教程-校准-线速度校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Ailibot入门教程-校准-线速度校准
说明
- 介绍如何在Ailibot上进行线速度校准
相关设备:
- Ailibot套件,采购地址
操作步骤
-
校准前先准备一个校准环境,比如在地砖上标定一米的距离
-
示例图

- [Ailibot] 执行校准前,先将线速度修正系数修改为1.0
$ rosed ailibot_bringup minimal.launch
...
<node pkg="ailibot_bringup" name="ailibot_base_node" type="ailibot_base_node">
<param name="linear_scale_correction" type="double" value="1.0" />
<param name="angular_scale_correction" type="double" value="1.0" />- [Remote PC] 运行roscore
$ roscore- [Ailibot] 启动小车和校准程序
$ roslaunch ailibot_calib calibrate_linear.launch- [Remote PC] 运行rqt_reconfigure
$ rosrun rqt_reconfigure rqt_reconfigure- 效果如下:
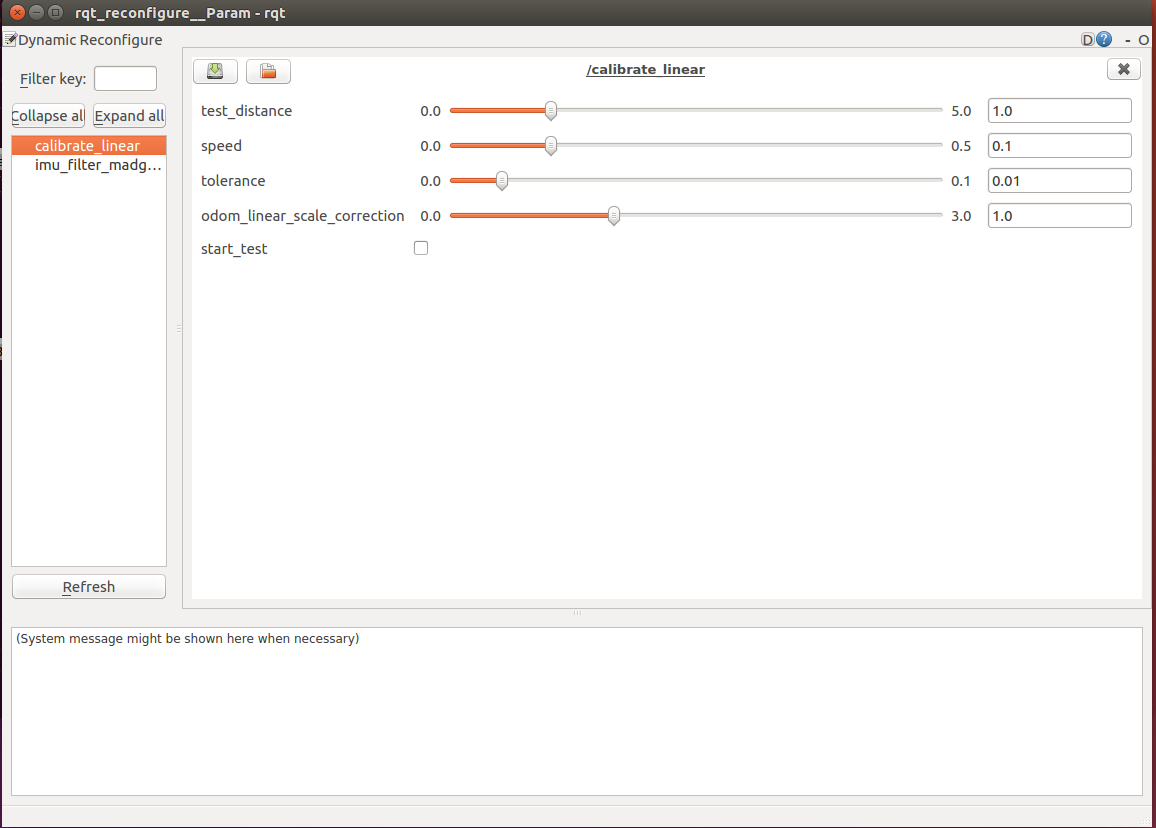
- 参数信息
- test_distance: 测试小车所需移动的距离
- seppd:小车的移动速度
- tolerance:与目标距离的容差值
- odom_linear_scale_correction: 线速度修正系数
- start_test: 启动测试的复选框-
将小车放在起点位置,选择好相关的参数值后点击启动测试的复选框
-
小车移动完后,用直尺测量实际移动的距离
-
odom_linear_scale_correction的值应为 实际移动的距离 / 测试距离,调整后再重新校准,适当调整该值 -
假设测试1米距离,而实际移动的距离为1.13米,那么将
odom_linear_scale_correction参数修改为1.13,其余不变,重新校准 -
但若重新校准后,实际移动的距离与理论上的距离相差无几,现在就可以保存
odom_linear_scale_correction线速度修正系数;反之则重新校准 -
[Ailibot] 保存
odom_linear_scale_correction线速度修正系数
//修改minimal.launch和bringup.launch文件下的linear_scale_correction参数
$ rosed ailibot_bringup minimal.launch
$ rosed ailibot_bringup bringup.launch- 修改完成后,中止所有终端,重新进行线速度校准,检查线速度修正系数是否正确加载
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=65737272&cid=114058322&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号