



















Ailibot入门教程-校准-PID校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Ailibot入门教程-校准-PID校准
说明
- 介绍如何在Ailibot上进行PID校准
相关设备:
- Ailibot套件,采购地址
操作步骤
- [Remote PC] 运行roscore
$ roscore- [Ailibot] 启动小车
$ roslaunch ailibot_bringup bringup.launch- [Ailibot] 启动PID校准程序
$ rosrun ailibot_pid pid_configure- [Remote PC] 启动键盘控制
$ roslaunch ailibot_teleop keyboard.launch- [Remote PC] 运行rqt
$ rqt-
打开rqt界面后,在屏幕左上方的菜单栏选择
Plugins->Configuration->Dynamic Reconfigure -
同时选择
Plugins->Visualization->Plot -
在Dynamic Reconfigure窗口下,点击pid_configure
-
调整右边的PID值,用键盘控制小车,然后检查图形结果
-
效果图如下:
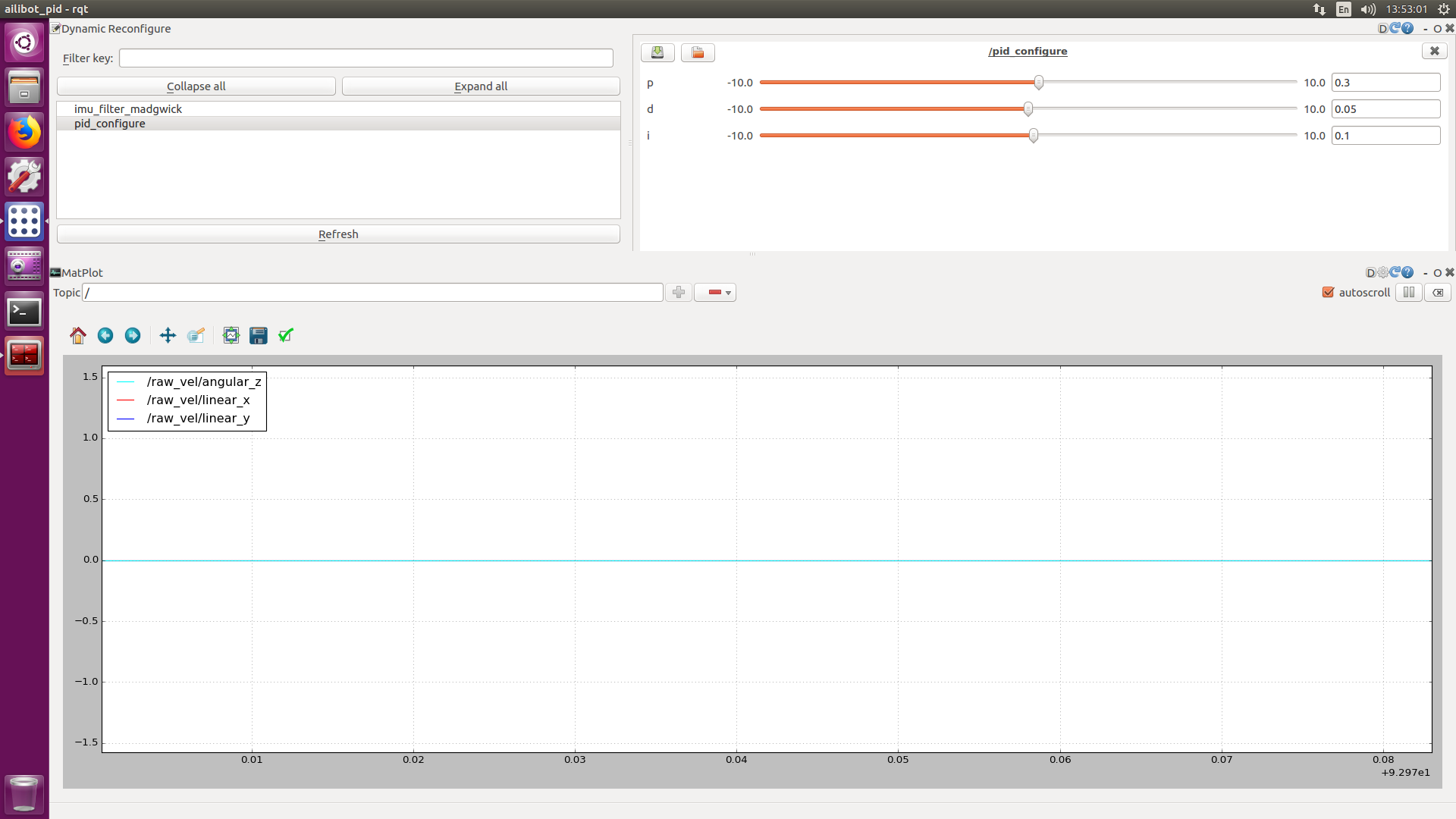
-
将小车的PID值设置到三线分别平滑运行且小车移动平稳,无明显的停顿
-
[Ailibot] 将校准得到的PID参数写入
ailibot_bringup包里的robot_type_d2.yaml里
// 根据实际所使用使用的机型来进行修改,例如:d2表示差速两轮底盘
$ rosed ailibot_bringup robot_type_d2.yaml
# PID
pid:
k_p: 0.6 #P constant
k_i: 0.3 #i constant
k_d: 0.5 #d constant- [Ailibot] 重新烧录固件
$ cd ~/tools/ailibot_fm_teensy_release/ && ./firmware_upload.sh演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=65733614&cid=114052071&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号