



















Turbot-AI多线入门教程-autoware真机-航点导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot-AI多线入门教程-autoware真机-航点导航
说明:
- 介绍如何利用autoware实现航点导航
步骤:
- 启动底盘
roslaunch turbot_bringup minimal.launch- 启动autoware
roslauch turbot_autoware run.launch-
切换到Quick Start分页
-
分别指定路径为~/autoware.ai/autoware-data/turbot/my_launch
-
加载map,选择my_map.launch
-
加载sensing,选择my_sensing.launch
-
加载localiztion, 选择my_localization.launch
-
效果如图:

-
点击打开rviz,正常能显示加载的地图
-
初始化定位,选择"2D Pose Estimate", 选择小车当前基于地图的位置
-
效果如下:

-
选择之后,就会在选择的位置上显示激光数据
-
加载任务规划
Mission Planning, 选择my_mission_waypoint.launch(加载 waypoints,在全局层面汽车需要跟踪的路线,可以看到 waypoints 附带的期望速度和方向) -
加载运动规划
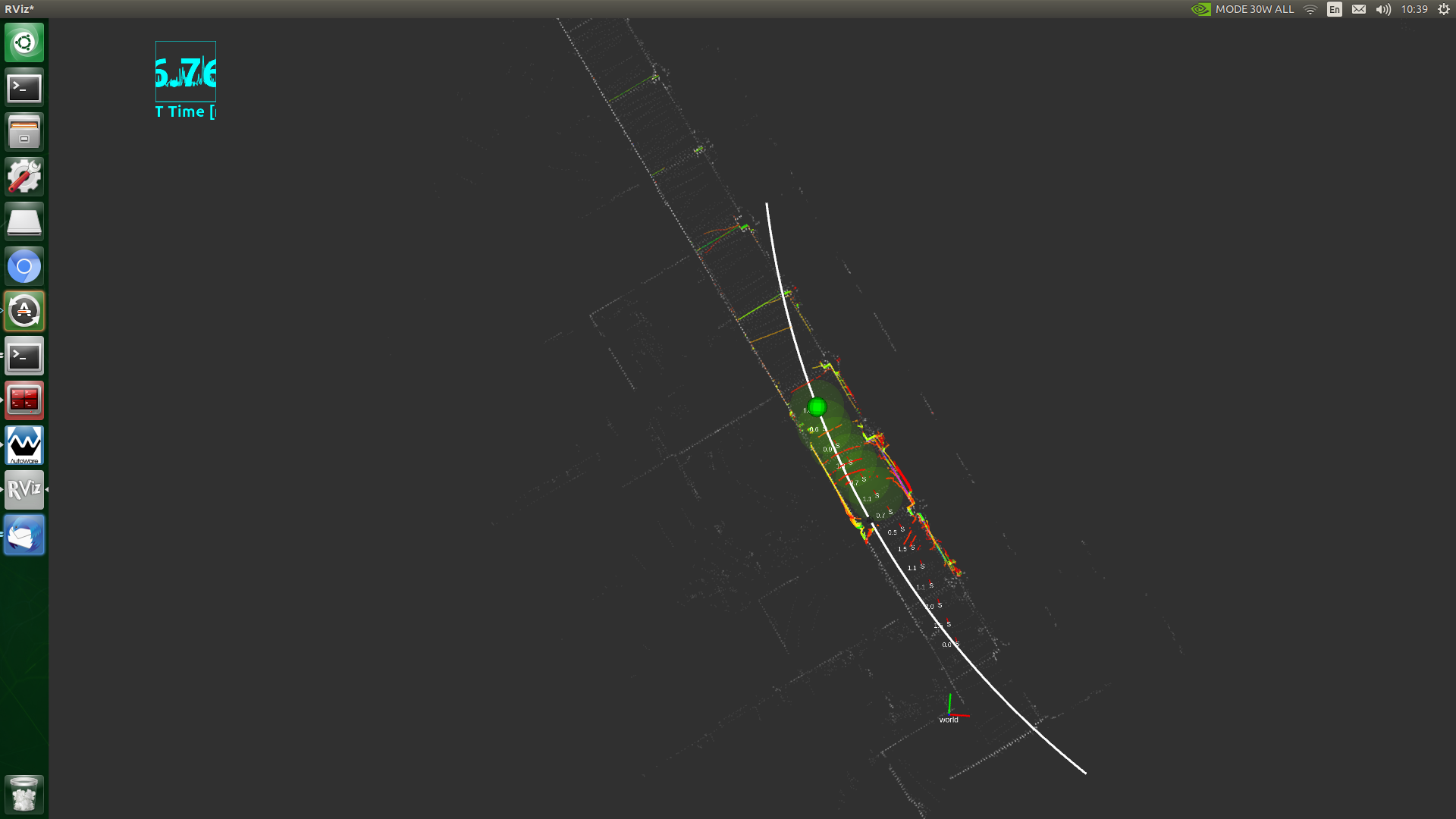
Motion Planning, 选择my_motion_planning.launch(显示汽车在跟踪每一个 waypoint 时的动作规划) -
效果如下:

- 顺利的话,小车会沿着路径点运行
- 效果如下:

- 效果2:
- 查看tf
rosrun rqt_tf_tree rqt_tf_tree
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号