



















walking机器人仿真教程-查看仿真环境相关话题

walking机器人仿真教程-查看仿真环境相关话题
说明:
- 介绍walking机器人如何启动仿真环境
相关设备:
- walking机器人套件:采购地址
步骤:
- 新终端,启动命令
- 目前收集了多个仿真环境,默认采用mememan_world,其他包括office.sdf,phenix_world.sdf,simple.sdf
- 默认启动如下
ros2 launch walking_gazebo world.launch.py- 效果图:
- 查看话题列表
$ ros2 topic list
/clock
/cmd_vel
/imu
/joint_states
/odom
/parameter_events
/performance_metrics
/rgb_camera/camera_info
/rgb_camera/image_raw
/rgb_camera/image_raw/compressed
/rgb_camera/image_raw/compressedDepth
/rgb_camera/image_raw/theora
/robot_description
/rosout
/scan
/tf
/tf_static- 查看雷达信息
$ ros2 topic echo /scan
--
header:
stamp:
sec: 58
nanosec: 158000000
frame_id: laser
angle_min: 0.0
angle_max: 6.28000020980835
angle_increment: 0.017541900277137756
time_increment: 0.0
scan_time: 0.0
range_min: 0.11999999731779099
range_max: 20.0
ranges:
- 3.736046314239502
- 3.6740000247955322
- 3.6429147720336914
- 3.5941758155822754
...................
- '...'
intensities:
- 0.0
- 0.0
- 0.0
- 0.0
...................
- '...'
---- 查看里程信息
$ ros2 topic echo /odom
---
header:
stamp:
sec: 618
nanosec: 64000000
frame_id: odom
child_frame_id: base_footprint
pose:
pose:
position:
x: 1.1471448623851346
y: -0.1456954220088117
z: -7.154365310180211e-07
orientation:
x: 1.593274608608113e-07
y: -1.3692192946271564e-06
z: -0.13045278909924055
w: 0.9914545223127126
covariance:
- 1.0e-05
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1.0e-05
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.001
twist:
twist:
linear:
x: -1.0751142433662118e-05
y: 1.0208784293020737e-05
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.00043032517609123443
covariance:
- 1.0e-05
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1.0e-05
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 1000000000000.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.001
---- 查看imu信息
$ ros2 topic echo /imu
---
header:
stamp:
sec: 667
nanosec: 108000000
frame_id: base_footprint
orientation:
x: 1.464210082826734e-07
y: -1.371145219477276e-06
z: -0.1408404845980011
w: 0.9900323014408666
orientation_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:
x: 1.982806233993939e-05
y: -0.01375810055450966
z: -0.0003004565760008374
angular_velocity_covariance:
- 4.0e-08
- 0.0
- 0.0
- 0.0
- 4.0e-08
- 0.0
- 0.0
- 0.0
- 4.0e-08
linear_acceleration:
x: -0.4423912044154092
y: -0.10037562452760843
z: 9.265428900410678
linear_acceleration_covariance:
- 0.00028900000000000003
- 0.0
- 0.0
- 0.0
- 0.00028900000000000003
- 0.0
- 0.0
- 0.0
- 0.00028900000000000003
---- 查看速度话题
$ ros2 topic echo /cmd_vel
linear:
x: 0.1
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---- 启动rviz2查看图像和深度数据等
rviz2
-
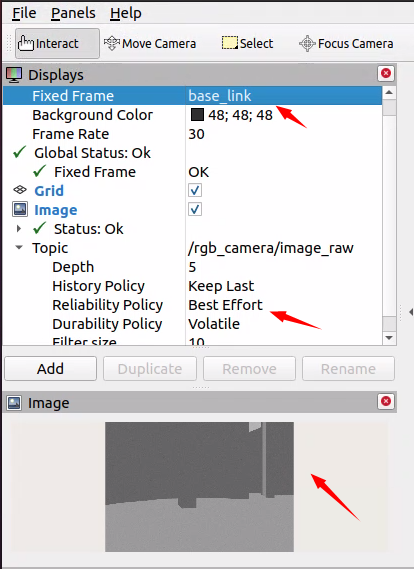
查看图像话题
-
点Add 按钮,添加图像话题/rgb_camera/image_raw,选择fixed frame为base_link, 选择topic下的Reliability Policy为Best Effort
-
效果图
-
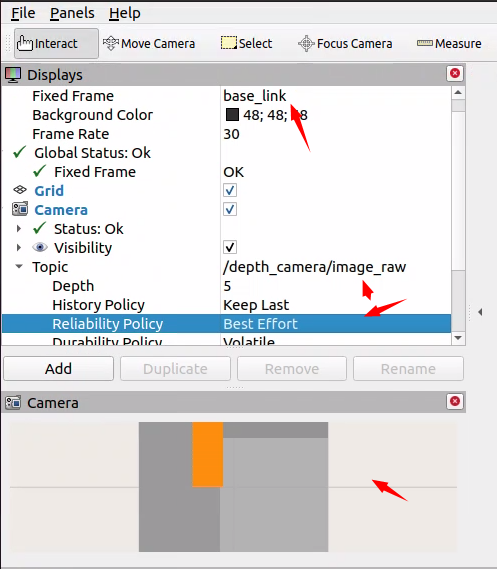
查看深度图像话题
-
点Add 按钮,添加图像话题/depth_camera/image_raw,选择fixed frame为base_link, 选择topic下的Reliability Policy为Best Effort
-
效果图
-
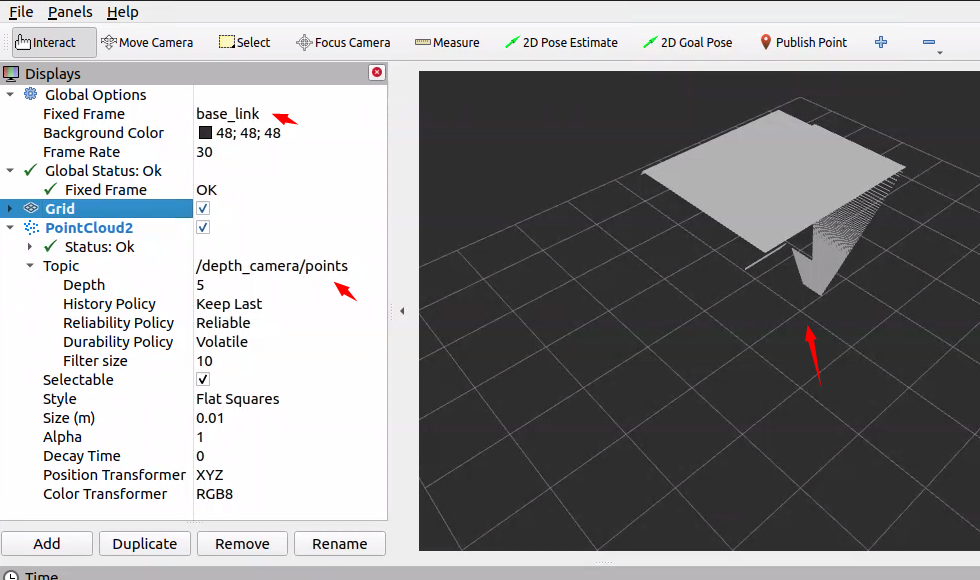
查看点云
-
点Add 按钮,添加点云话题/depth_camera/points,选择fixed frame为base_link
-
效果图
- 查看TF树
ros2 run tf2_tools view_frames- 保存TF树的PDF在当前目录下,名为frames.pdf,打开PDF
evince frames.pdf- 效果图:
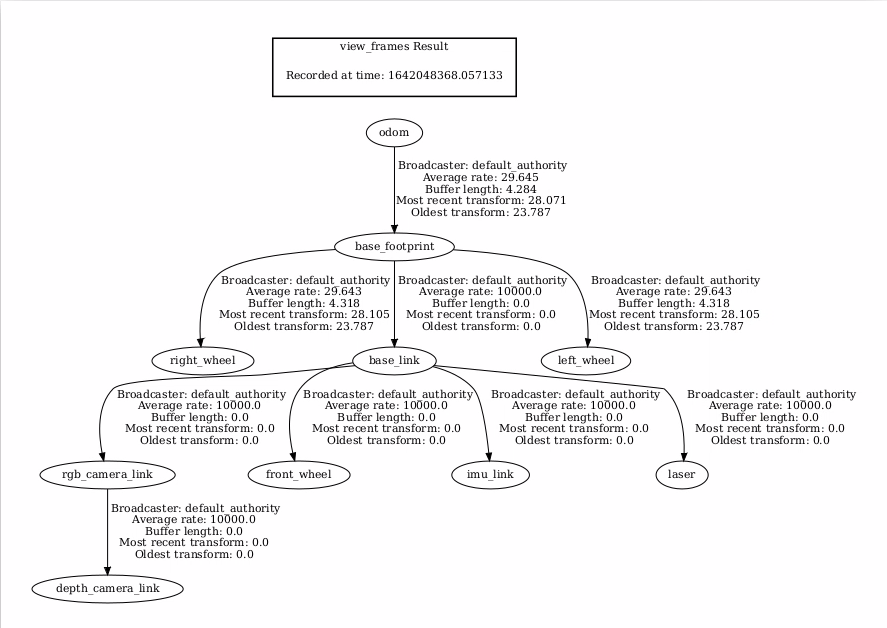
- 这是有一个问题就是left_wheel/right_wheel仿真下关联到base_footprint下,而不是base_link,真机是关联到base_link
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=635733438&bvid=BV1tb4y1J7JX&cid=484045533&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>