



















walking机器人仿真教程-仿真控制

walking机器人仿真教程-仿真控制
说明:
- 介绍如何在仿真下控制walking机器人
相关设备:
- walking机器人套件:采购地址
步骤:
- 新开终端,启动仿真环境
ros2 launch walking_gazebo world.launch.py- 整合了多种控制方式,键盘控制,手柄控制,鼠标控制
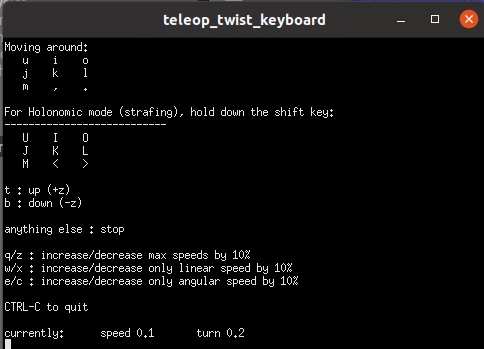
- 新开终端,启动键盘控制,基于teleop_twist_keyboard修改
ros2 launch walking_teleop keyboard.launch.py- 效果图:
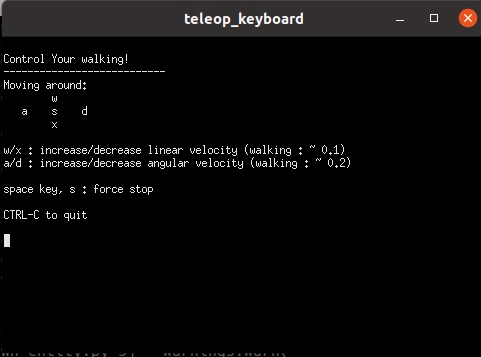
- 新开终端,启动键盘控制,基于turtlebot3修改
ros2 launch walking_teleop keyboard_simple.launch.py- 效果图:
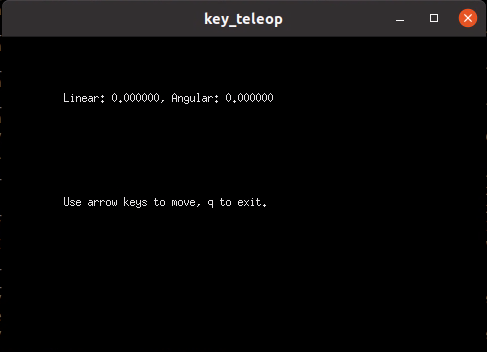
- 新开终端,启动键盘控制,基于teleop_tools整合
ros2 launch walking_teleop teleop_key.launch.py- 通过按下四个方向键来控制
- 效果图:
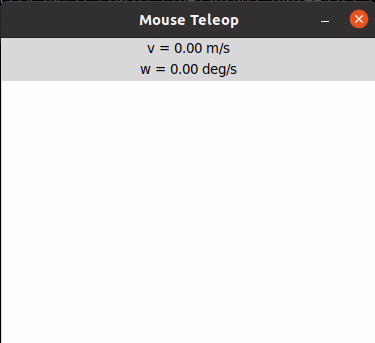
- 新开终端,启动鼠标控制,基于teleop_tools整合
ros2 launch walking_teleop teleop_mouse.launch.py- 通过按下鼠标来控制
- 效果图:
- 新开终端,启动手柄控制,基于teleop_tools整合
ros2 launch walking_teleop teleop_joy.launch.py- 需要先配对xbox或ps遥控器
- 新开终端,启动手柄控制,基于joy包整合
ros2 launch walking_teleop joy.launch.py- 需要先配对xbox或ps遥控器
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=593209459&bvid=BV1Vq4y117NQ&cid=484048331&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>