walking机器人仿真教程-应用-多点导航实现房间内巡逻检查

walking机器人仿真教程-应用-多点导航实现房间内巡逻检查
说明:
- 这个应用模拟房间内巡逻检查
相关设备:
- walking机器人套件:采购地址
步骤:
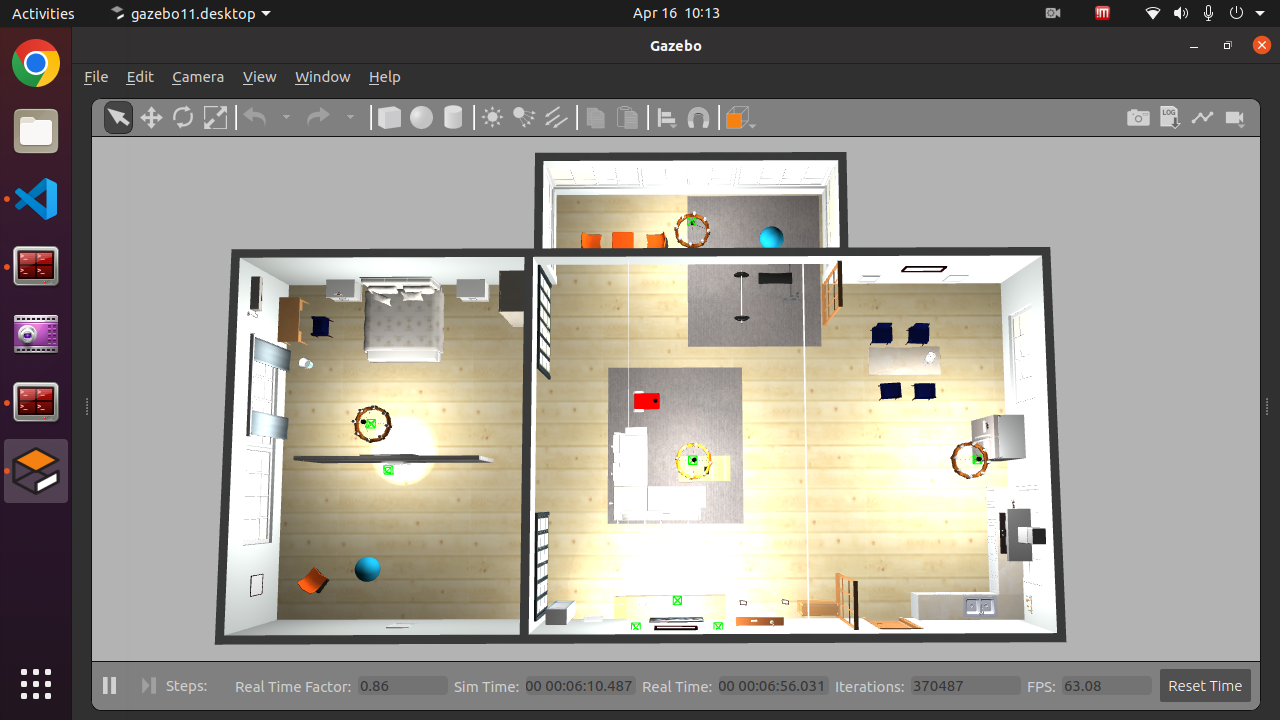
- 加载gazebo
. /usr/share/gazebo/setup.bash- 启动仿真
ros2 launch walking_application house_world_inspection.launch.py- 效果图:
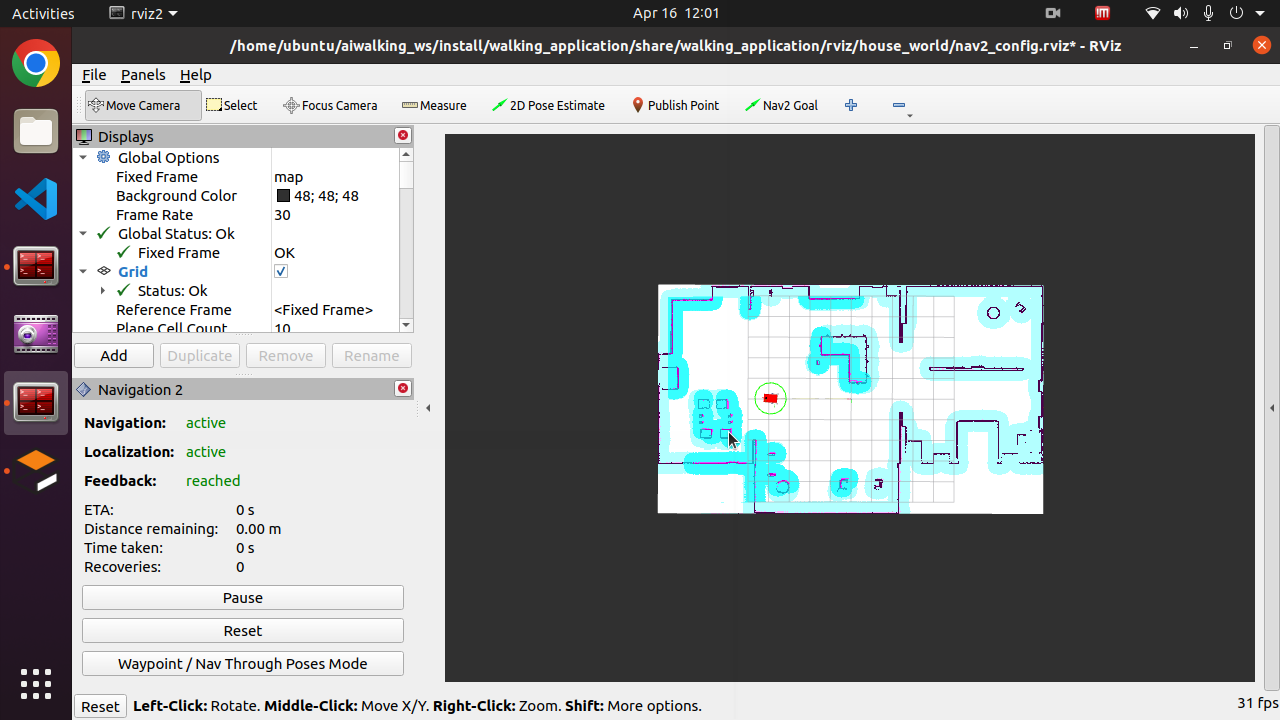
- 启动检查
ros2 run walking_application run_inspection.py- 启动之后,在房间内指定的地点导航完成检查。
- 效果图: