



















walking机器人仿真教程-应用-发送路径进行导航实现田地作物检查

walking机器人仿真教程-应用-发送路径进行导航实现田地作物检查
说明:
- 介绍如何通过发送路径进行导航实现田地作物检查
相关设备:
- walking机器人套件:采购地址
步骤:
- 加载gazebo环境
. /usr/share/gazebo/setup.bash- 启动仿真
ros2 launch walking_application farm_world_v2.launch.py- 效果图:

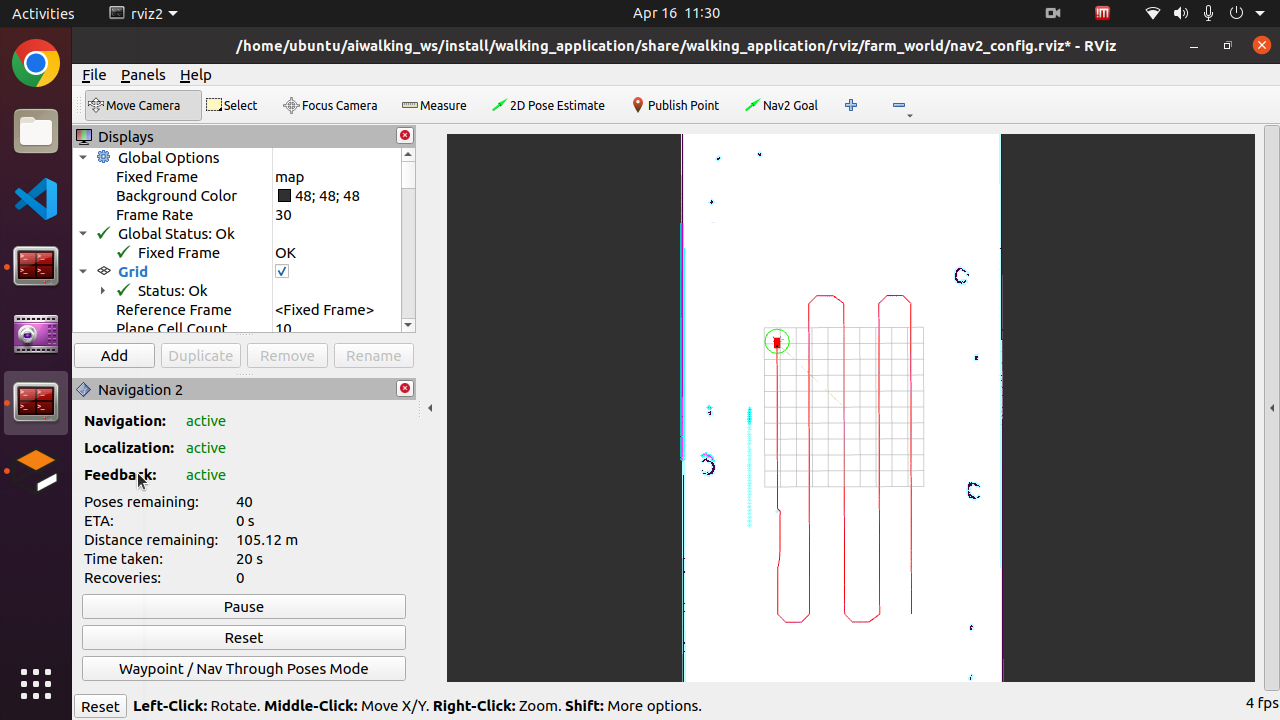
- 启动导航
ros2 run walking_application nav_through_poses.py- 启动之后,机器人根据规划的路线,进行导航。
- 效果图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=425929459&bvid=BV1n3411M7WQ&cid=581540456&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>