



















walking机器人仿真教程-加载不同的gazebo世界

walking机器人仿真教程-加载不同的gazebo世界
说明:
- 介绍如何启动整理的gazebo世界 - 这些针对不同场景的gazebo世界适合不同的测试需要
相关设备:
- walking机器人套件:采购地址
步骤:
- 运行前加载
. /usr/share/gazebo/setup.bash- 医院场景
ros2 launch walking_application hospital_world_v1.launch.py- 效果图:

- 草坪场景
ros2 launch walking_application lawn_world_straightline.launch.py- 效果图:

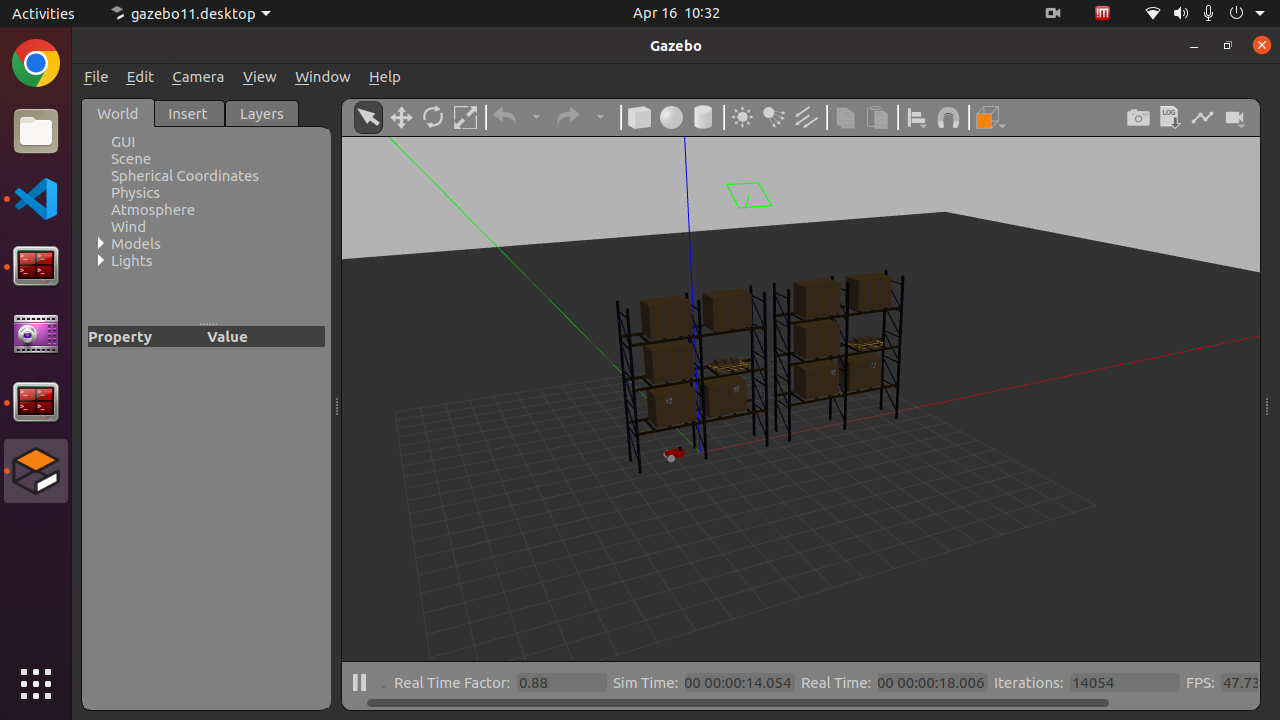
- 仓库场景
ros2 launch walking_application warehouse_world_preferred_lanes.launch.py- 效果图:

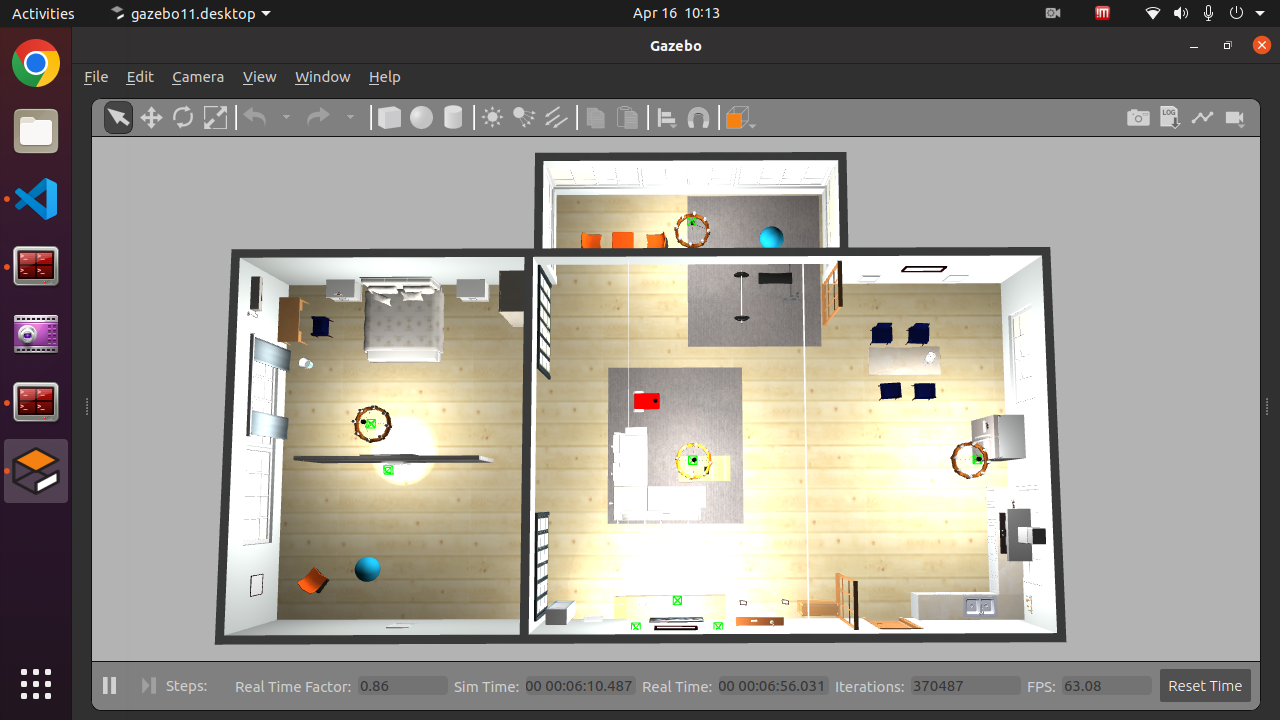
- 房间场景
ros2 launch walking_application house_world_inspection.launch.py- 效果图:
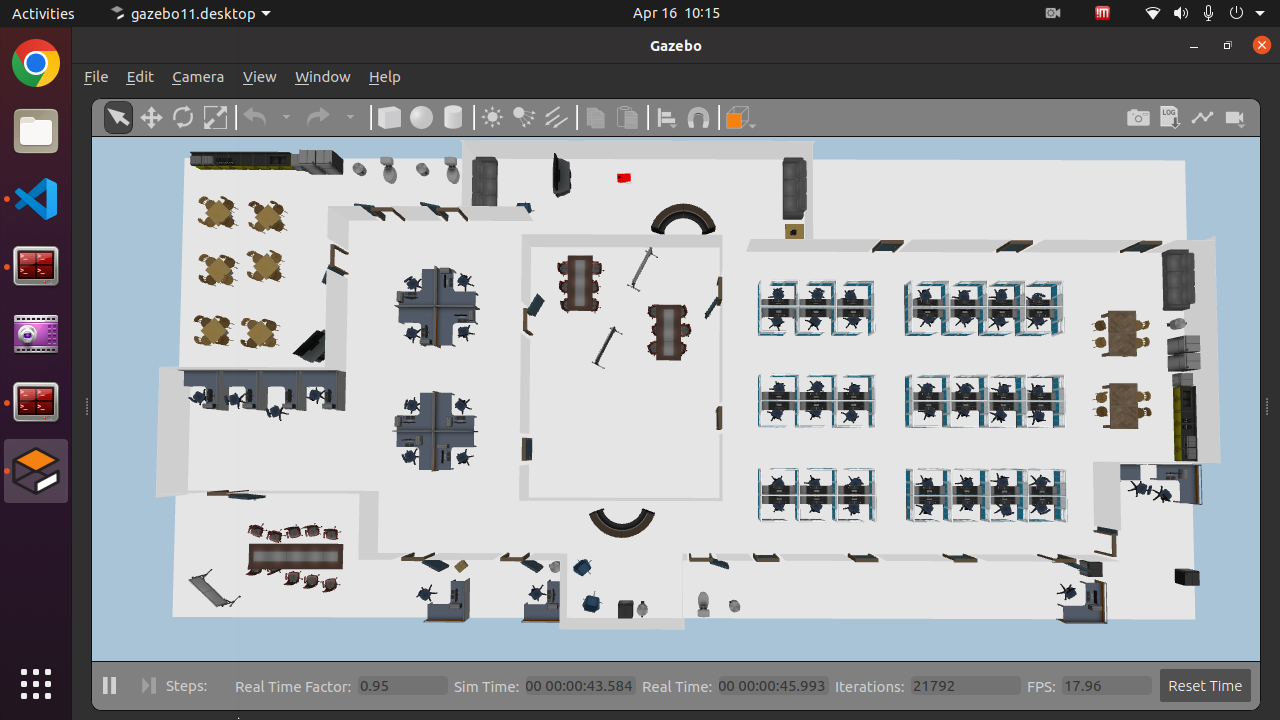
- 办公室场景
ros2 launch walking_application office_world_v1.launch.py- 效果图:
- 咖啡店场景
ros2 launch walking_application cafe_world_turtlebot_waffle.launch.py- 效果图:

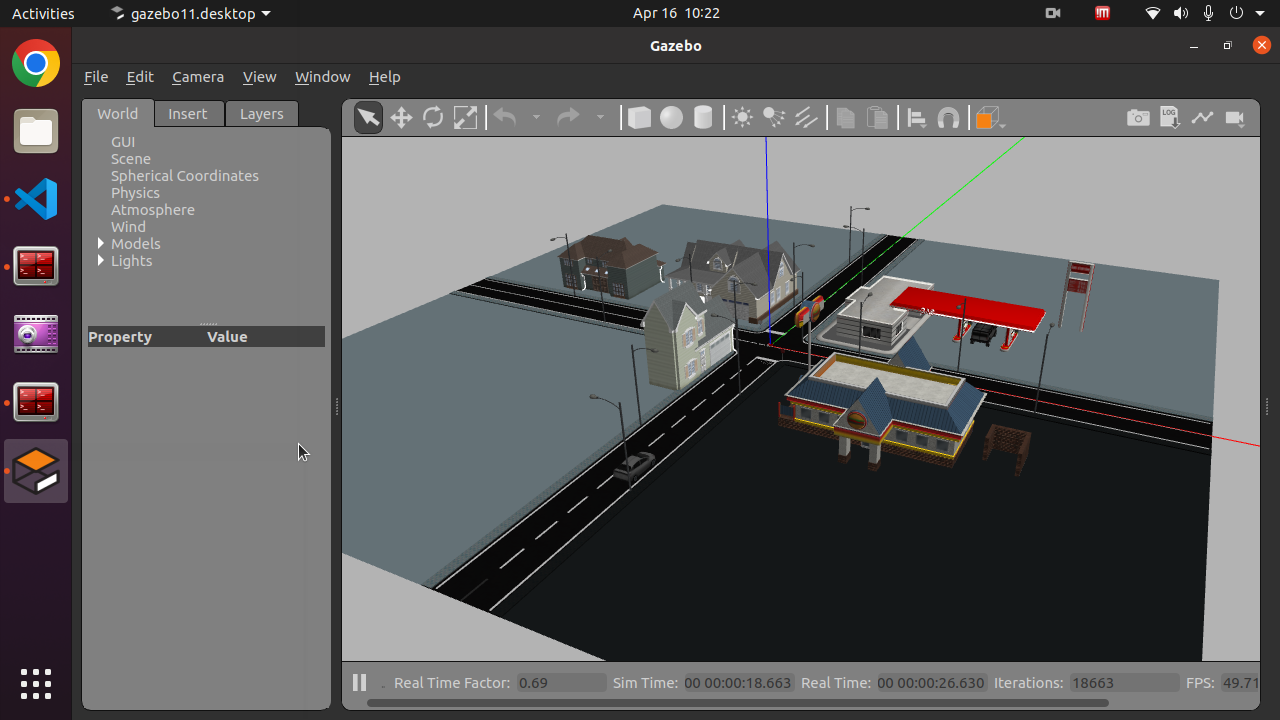
- 小镇场景
ros2 launch walking_application car_world_v1.launch.py- 效果图:
- 农田场景
ros2 launch walking_application farm_world_v2.launch.py- 效果图:

- 工厂场景
ros2 launch walking_application factory_world_v1.launch.py- 效果图:

- 仓库存货场景
ros2 launch walking_application inventory_world_v1.launch.py- 效果图:
- 小区场景
ros2 launch walking_application neighborhood_world_v2.launch.py- 效果图:

演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=468469210&bvid=BV1u5411177i&cid=582828361&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>参考:
-
https://github.com/mlherd/Dataset-of-Gazebo-Worlds-Models-and-Maps
-
https://github.com/PacktPublishing/ROS-Robotics-Projects-SecondEdition
-
https://github.com/aws-robotics/aws-robomaker-small-house-world
-
https://github.com/aws-robotics/aws-robomaker-hospital-world
-
https://github.com/shreyasgokhale/CustomRobots/tree/multirobot-testing
-
https://github.com/JdeRobot/CustomRobots/tree/melodic-devel/car_junction
-
https://automaticaddison.com/useful-world-files-for-gazebo-and-ros-2-simulations/