



















walking机器人仿真教程-应用-控制走圆形

walking机器人仿真教程-应用-控制走圆形
说明:
- 介绍如何通过编程走圆形
相关设备:
- walking机器人套件:采购地址
步骤:
- 新终端,启动仿真
ros2 launch walking_gazebo world.launch.py world_model:=follow.sdf- 效果图:

- 新终端,启动服务端
ros2 launch walking_example patrol_server.launch.py- 新终端,启动客户端
ros2 launch walking_example patrol_client.launch.py- 弹出的控制界面
- 效果图:
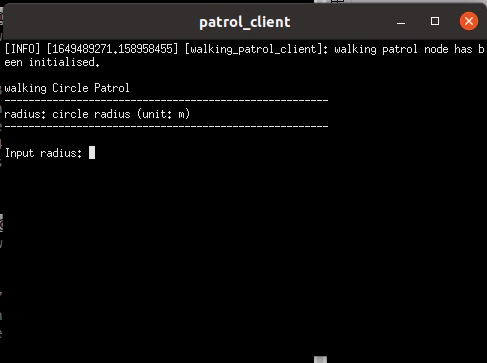
- 在弹出的界面上,输入圆形半径比如3, 点击回车后, 小车自动运行.围绕半径为3米的圆移动一圈