



















walking机器人仿真教程-激光导航-仿真融合建图和导航

walking机器人仿真教程-激光导航-仿真融合建图和导航
说明:
- 介绍如何进行融合建图和导航
相关设备:
- walking机器人套件:采购地址
步骤:
- 启动仿真环境
ros2 launch walking_gazebo world.launch.py- 启动gazebo, 默认启动mememan_world.sdf场景
- 启动导航,并启用建图
ros2 launch walking_navigation bringup.launch.py use_slam:=true use_sim_time:=true- 启动导航和rviz,效果图
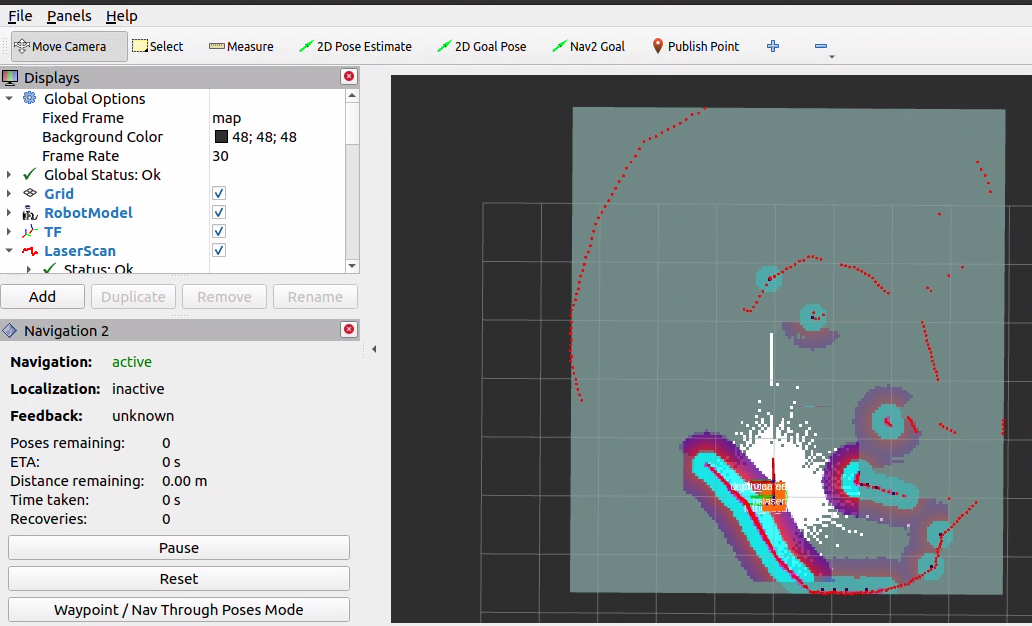
- 选择单点导航模式
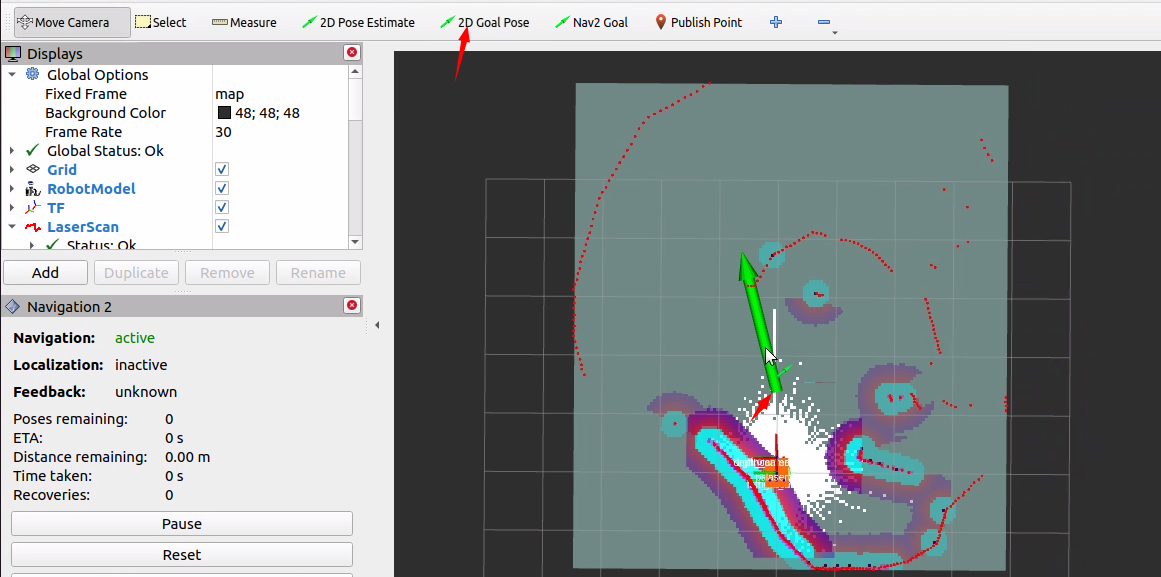
- 在点击2D Goal Pose按钮,指定一个机器人要到达的位置即选择机器人要达到地图上位置,选择后即开始导航
- 选择waiypoint多点导航模式
- 在点击nav2 Goal按钮,指定多个机器人要到达的位置即选择机器人要达到地图上位置, 每点一次添加一个目标点。
- 再点击Start Nav Through Pose导航按钮或点击Start Waypoint Following导航按钮,机器人即可跟随每个坐标点逐一导航。

- 也可以使用命令发布目标点:
ros2 topic pub /goal_pose geometry_msgs/PoseStamped "{header: {stamp: {sec: 0}, frame_id: 'map'}, pose: {position: {x: 5.0, y: -2.0, z: 0.0}, orientation: {w: 1.0}}}"演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=253152175&bvid=BV1uY411h7sj&cid=484052008&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>