



















walking机器人入门教程-测试航点保存工具

说明
- 介绍如何实现利用桌面工具记录和保存航点信息
原理
- 通过界面实际显示小车的位置信息,方向信息
- 通过点击记录按钮,实现保存位置信息和方向信息的数据
- 通过点击保存到文件按钮,实现把记录的位置和方向信息数组保存到指定文件
步骤
- 启动底盘
~/scripts/bringup_robot.sh- 启动建图
~/scripts/slam_toolbox.sh- rviz效果图:

- 启动航点信息工具
~/scripts/waypoint_logger.sh- 效果图:
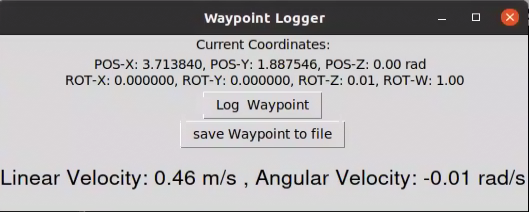
-
通过点击log waypoint实现记录航点
-
通过点击save waypoint to file保存之前记录过的航点,选择文件进行保存
-
航点内容格式:
{
"pose": [
{
"id": 0,
"orient_w": 0.9998463204931819,
"orient_x": 0.0,
"orient_y": 0.0,
"orient_z": -0.017530983892681817,
"pos_x": 0.019922086328915234,
"pos_y": -0.027898208771903743
},
{
"id": 1,
"orient_w": 0.9998463204931819,
"orient_x": 0.0,
"orient_y": 0.0,
"orient_z": -0.017530983892681817,
"pos_x": 0.019922086328915234,
"pos_y": -0.027898208771903743
},
{
"id": 2,
"orient_w": 0.9998463204931819,
"orient_x": 0.0,
"orient_y": 0.0,
"orient_z": -0.017530983892681817,
"pos_x": 0.019922086328915234,
"pos_y": -0.027898208771903743
},
{
"id": 3,
"orient_w": 0.9998463204931819,
"orient_x": 0.0,
"orient_y": 0.0,
"orient_z": -0.017530983892681817,
"pos_x": 0.019922086328915234,
"pos_y": -0.0278982087719033
}
]
}- 保存航点内容之后,可以进行导航精度测试或做航点导航