



















racebot入门教程-MIT实验-定点导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
racebot入门教程-MIT实验-定点导航
说明:
- 介绍如何实现按照指定目标点导航
相关设备:
- racebot套件,采购地址
步骤:
-
指定Particle Filter定位一节中map_server的需要使用的地图
-
[RaceBot] 启动底盘
$ roslaunch racebot minimal.launch- [RaceBot] 启动激光雷达
$ roslaunch racebot rplidar.launch- [RaceBot] 启动定位
$ roslaunch localization localize.launch(新版)
$ roslaunch ta_lab5 localize.launch(旧版)- [RaceBot] 启动跟随
$ roslaunch path_planning follow_trajectory.launch(新版)
$ roslaunch ta_lab6 follow_trajectory.launch(旧版)- [RaceBot] 启动航点控制
$ roslaunch path_planning waypoint_control.launch(新版)
$ roslaunch ta_lab6 waypoint_control.launch(旧版)- [Remote PC] 启动rviz
$ roslaunch path_planning search_rviz.launch(新版)
$ roscd ta_lab6/rviz(旧版)
$ rosrun rviz rviz -d search.rviz-
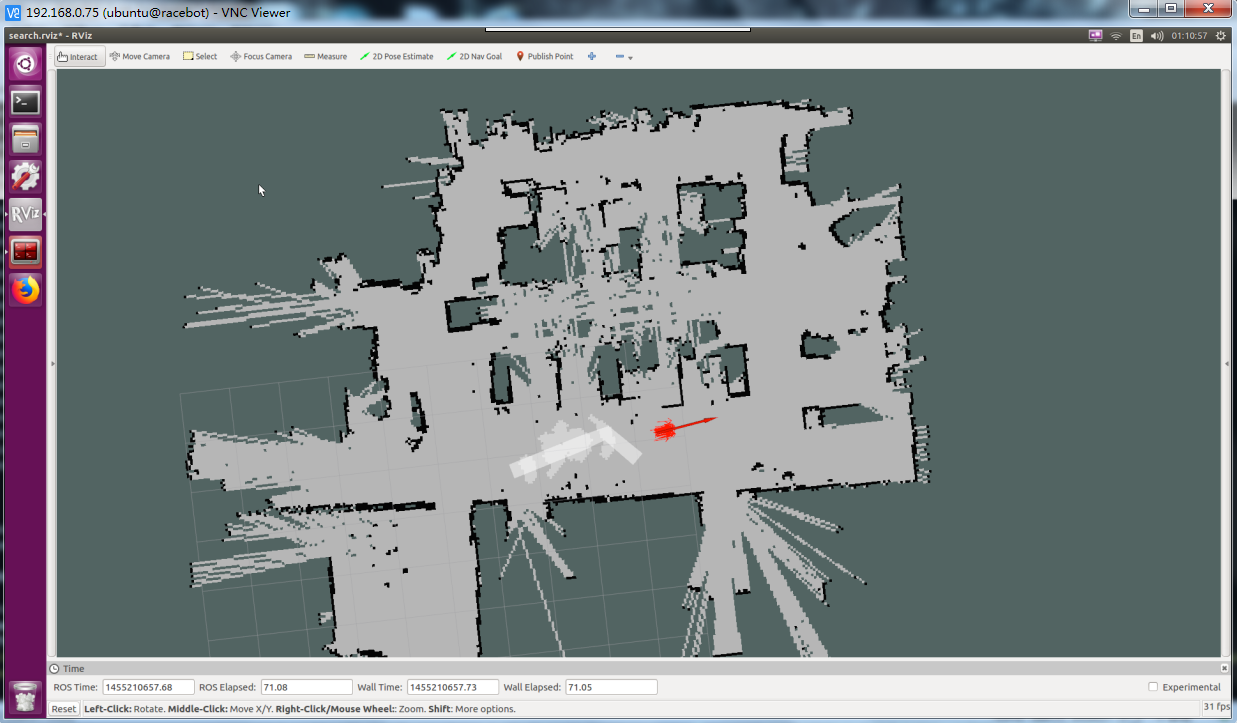
在rviz中通过2D Pose Estimate初始化位姿,在通过2D Nav Goal 来指定目标点,会自动生成行走的轨迹,并开始跟随这个轨迹行走。
-
效果如下:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号