



















racebot入门教程-测试-IMU测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
racebot入门教程-测试-IMU测试
说明:
- 介绍如何测试IMU
- 注意此版本已经丢弃,使用新版本测试方法
相关设备:
- racebot套件,采购地址
安装IMU驱动:
ARDUINO IDE测试IMU:
-
启动arduino IDE
-
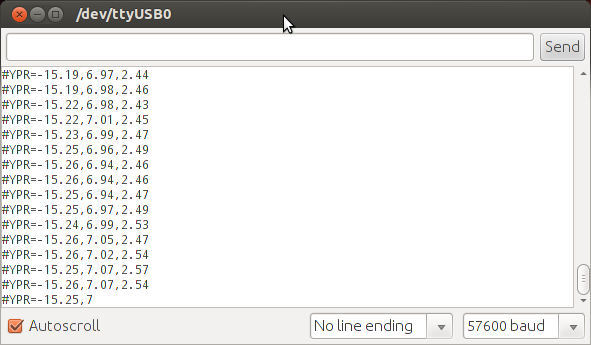
打开 "Tools" → "Serial Monitor"
-
图示:
ROS下测试IMU:
- [Racebot] 启动IMU驱动
$ roslaunch razor_imu_9dof razor-pub.launch- [Remote PC] 查看相关话题
$ rostopic list- [Remote PC] 读取IMU数据
$ rostopic echo /imu_data- 数据如下:
---
header:
seq: 328
stamp:
secs: 1551260780
nsecs: 234694957
frame_id: base_imu_link
orientation:
x: 0.00419112380065
y: -0.0011557932593
z: -0.435622802123
w: 0.900118810432
orientation_covariance: [0.0025, 0.0, 0.0, 0.0, 0.0025, 0.0, 0.0, 0.0, 0.0025]
angular_velocity:
x: -0.0
y: -0.0
z: -0.0
angular_velocity_covariance: [0.02, 0.0, 0.0, 0.0, 0.02, 0.0, 0.0, 0.0, 0.02]
linear_acceleration:
x: -0.004979609375
y: 0.05286046875
z: 9.95423914062
linear_acceleration_covariance: [0.04, 0.0, 0.0, 0.0, 0.04, 0.0, 0.0, 0.0, 0.04]参考地址:
- https://github.com/sparkfun/9DOF_Razor_IMU/tree/v30/Firmware/_9DoF_Razor_M0_Firmware
- https://learn.sparkfun.com/tutorials/9dof-razor-imu-m0-hookup-guide
- https://github.com/sparkfun/SparkFun_MPU-9250-DMP_Arduino_Library
- https://github.com/cmaglie/FlashStorage
- https://github.com/lebarsfa/9DOF_Razor_IMU
- https://answers.ros.org/question/261398/sparkfun-9dof-razor-imu-sen-14001/
- https://github.com/KristofRobot/razor_imu_9dof/pull/34
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号