



















racebot入门教程-测试-绘制ODOM运行轨迹(新版)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
racebot入门教程-测试-绘制ODOM运行轨迹(新版)
说明:
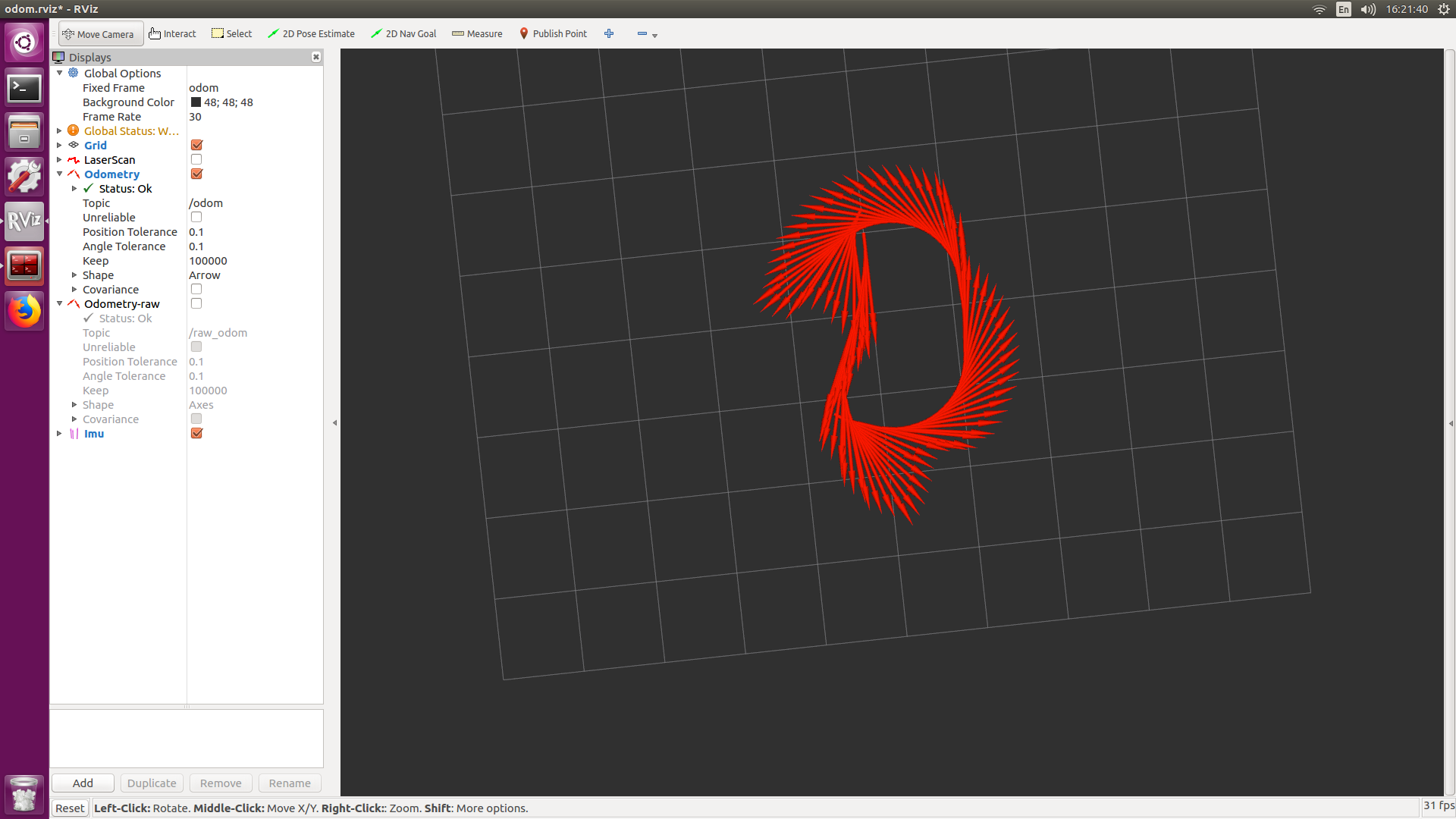
- 介绍如何在rviz绘制odom的运行轨迹
相关设备:
- racebot套件,采购地址
步骤:
- [RaceBot] 新开终端,启动底盘
roslaunch racebot minimal.launch- [RaceBot] 新开终端,启动游戏杆
roslaunch racebot joy.launch- [RaceBot] 新开终端,录制rosbag
roscd racebot/rosbag
./rosbag_record.sh- 默认保存在~/rosbag目录下,默认名称为rosbag_sample.bag, 记录odom和odom_raw话题
- 利用游戏杆,控制小车运动,以便生成数据,可以在一个范围跑一圈
- 通过ctrl+c 中止录制
- [RaceBot] 新开终端,启动rviz
roslaunch racebot odom_rviz.launch- [RaceBot] 新开终端,启动rosbag回放
cd ~/rosbag/
rosbag play rosbag_sample.bag- 效果如下:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号