



















PX4用户指南-基本配置-指南针/罗盘
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-基本配置-指南针
说明:
- 介绍如何为指南针校准
指南针校准
- QGroundControl将引导您将车辆定位在多个设定方向上,并围绕指定的轴旋转车辆。
执行校准
-
如果您使用外部磁力计/指南针,例如集成到GPS模块中的指南针,请确保将外部指南针正确安装在车辆上并将其连接到自动驾驶仪硬件。
-
有关连接GPS +指南针的说明,请参阅基本组件中的特定自动驾驶仪硬件。
-
连接后,QGroundControl将自动检测外部磁力。
-
- 启动QGroundControl并连接车辆。
-
- 选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
-
- 单击指南针传感器按钮。
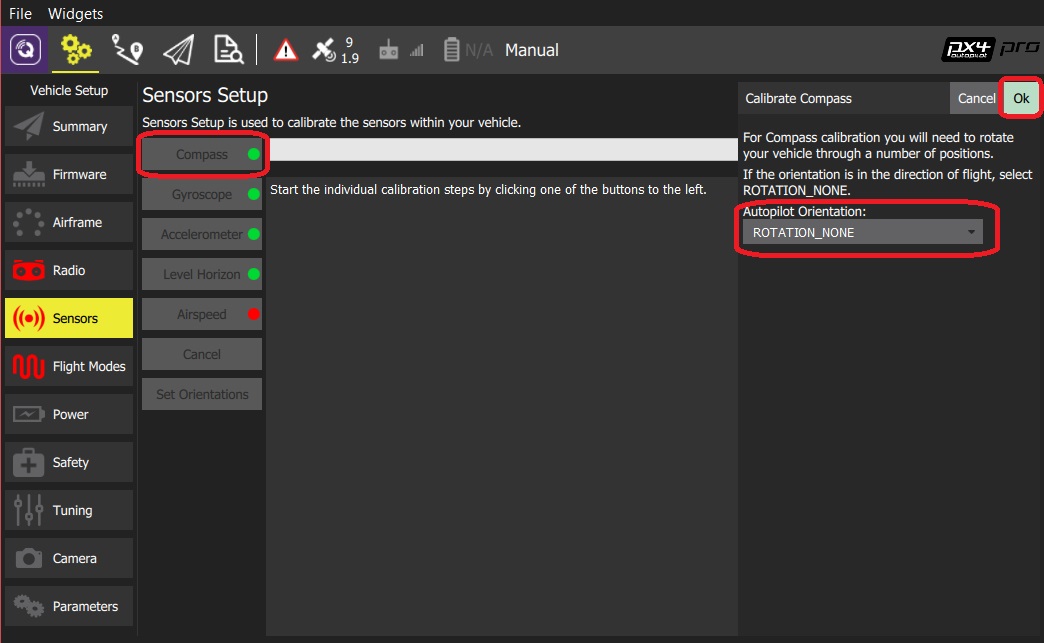
- 您应该已经设置了自动驾驶仪方向。 如果没有,您也可以在此处进行设置。
-
- 单击“确定”开始校准。
-
- 将车辆置于红色(不完整)所示的任何方向并保持静止。
- 一旦提示(方向图像变为黄色),则在任一/两个方向上围绕指定轴旋转车辆。
- 完成当前方向的校准后,屏幕上的相关图像将变为绿色。
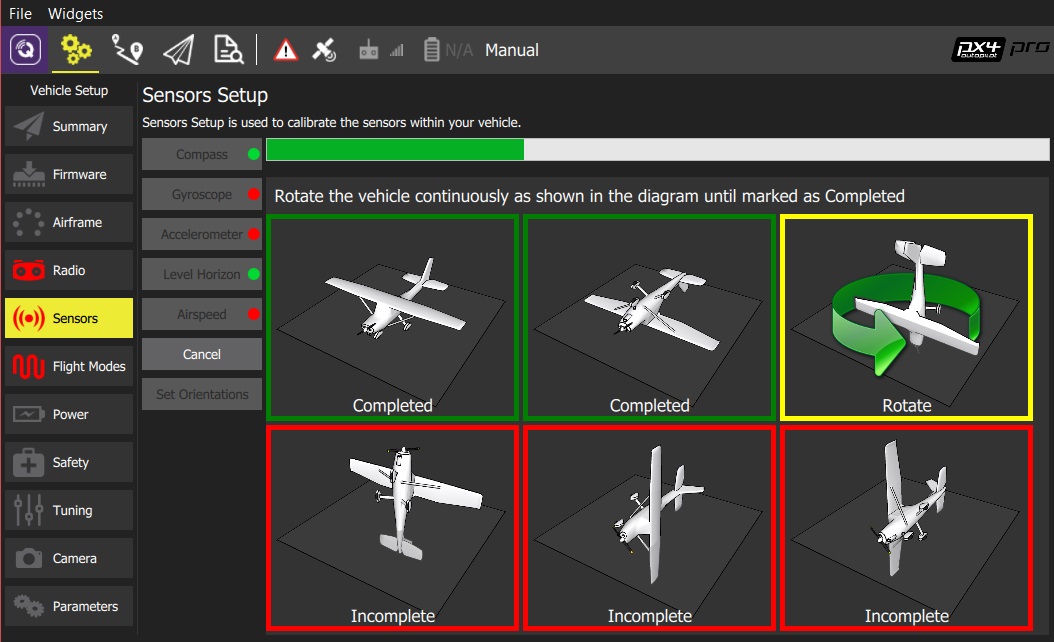
-
- 对所有车辆方向重复校准过程。
- 一旦您在所有位置校准了车辆,QGroundControl将显示校准完成(所有方向图像将以绿色显示,进度条将完全填满)。
- 然后,您可以继续下一个传感器。
更多信息
- QGroundControl用户指南>传感器
- PX4设置视频 - @ 2m38s(Youtube) https://youtu.be/91VGmdSlbo4?t=2m38s
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号