



















PX4用户指南-基本配置-水平校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-基本配置-水平校准
说明:
- 介绍如何实现水平平面校准
水平校准
- 您可以使用水平平面校准来补偿控制器方向的小错误对齐,并在QGroundControl飞行视图中调平水平(顶部为蓝色,底部为绿色)。
- 强烈建议平衡地平线,并将产生最佳的飞行性能。 如果您在飞行过程中发现持续漂移,也可以重复此过程。
执行校准
-
- 启动QGroundControl并连接车辆。
-
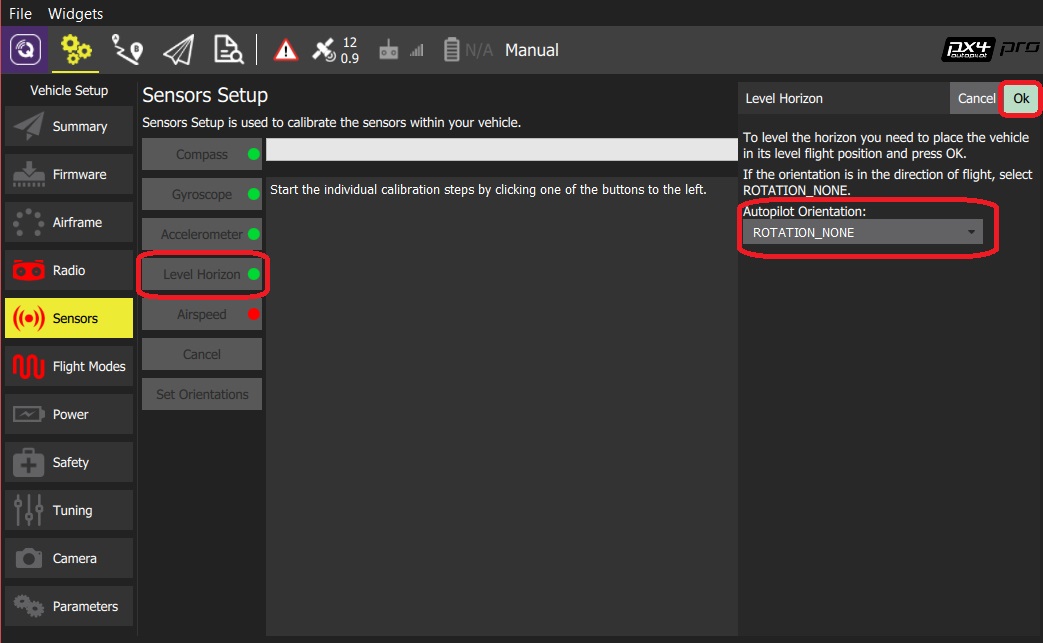
- 选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
-
- 单击“Level Horizon”按钮。
-
您应该已经设置了自动驾驶仪方向。 如果没有,您也可以在此处进行设置。
-
- 将车辆置于水平飞行方向的水平面上:
-
对于飞机而言,这是在水平飞行期间的位置(飞机往往会略微抬起它们的翅膀!)
-
对于直升机,这是悬停位置。
-
- 按OK开始校准过程。
-
- 等到校准过程结束。
验证
- 设置方向并完成水平表面校准后,在飞行视图中检查当指示车辆朝北并且地平线处于水平位置时,指南针中的航向显示的值约为0(顶部为蓝色,底部为绿色))。
更多信息
- 高级方向调整(仅限高级用户)。
- QGroundControl用户指南>传感器
- PX4设置视频“陀螺仪” - @ 1m14s(Youtube) https://youtu.be/91VGmdSlbo4?t=1m14s
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号