



















PX4用户指南-机身构建-固定翼-wing_wing_z84
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-固定翼-wing_wing_z84
说明:
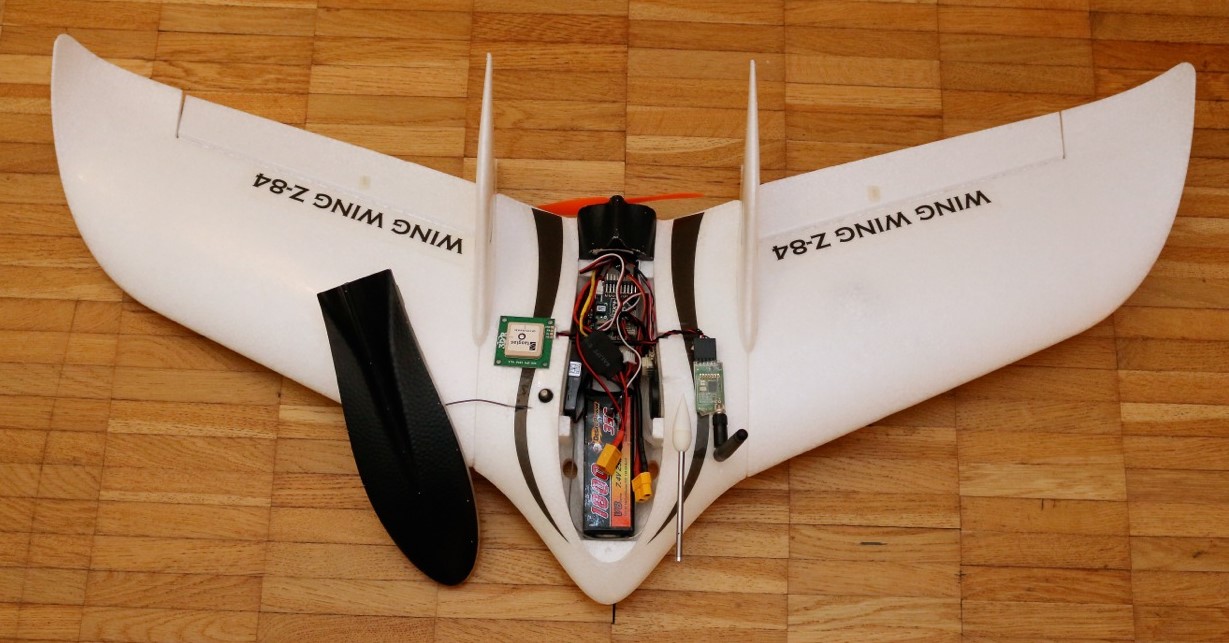
- 翼翼Z-84是我们的黄金标准机身:小巧,坚固,足以承载Pixracer
关键信息:
- 框架:翼翼Z-84
- 飞行控制器:Pixracer
- 图示:
零件清单
-
Z-84 Plug n'Fly(PNF / PNP)或套件
-
电子调速器(ESC)
-
Blue Series 12A ESC (Hobbyking)
-
ePower Pro 12A (Eflight - Switzerland)
-
自动驾驶仪和基本组件
-
Pixracer kit (including GPS and power module)
-
FrSky D4R-II receiver or equivalent (jumpered to PPM sum output according to its manual)
-
Mini telemetry set for HKPilot32
-
Digital airspeed sensor for HKPilot32 / Pixfalcon
-
1800 mAh 2S LiPo Battery - e.g. Team Orion 1800mAh 7.4V 50C 2S1P
-
推荐的备件
-
1 cm diameter O-ring for prop saver (Hobbyking International Warehouse)
-
125x110 mm propellers (Hobbyking)
接线
- 以下接线适用于Pixhawk和Pixracer。
- 使用主输出,而不是标有AUX的输出。
- 电机控制器需要内置BEC,因为自动驾驶仪不为伺服导轨供电。
| Port | Connection |
|---|---|
| RC IN | PPM or S.BUS / S.BUS2 input |
| MAIN 1 | Left Aileron |
| MAIN 2 | Right Aileron |
| MAIN 3 | Empty |
| MAIN 4 | Throttle |
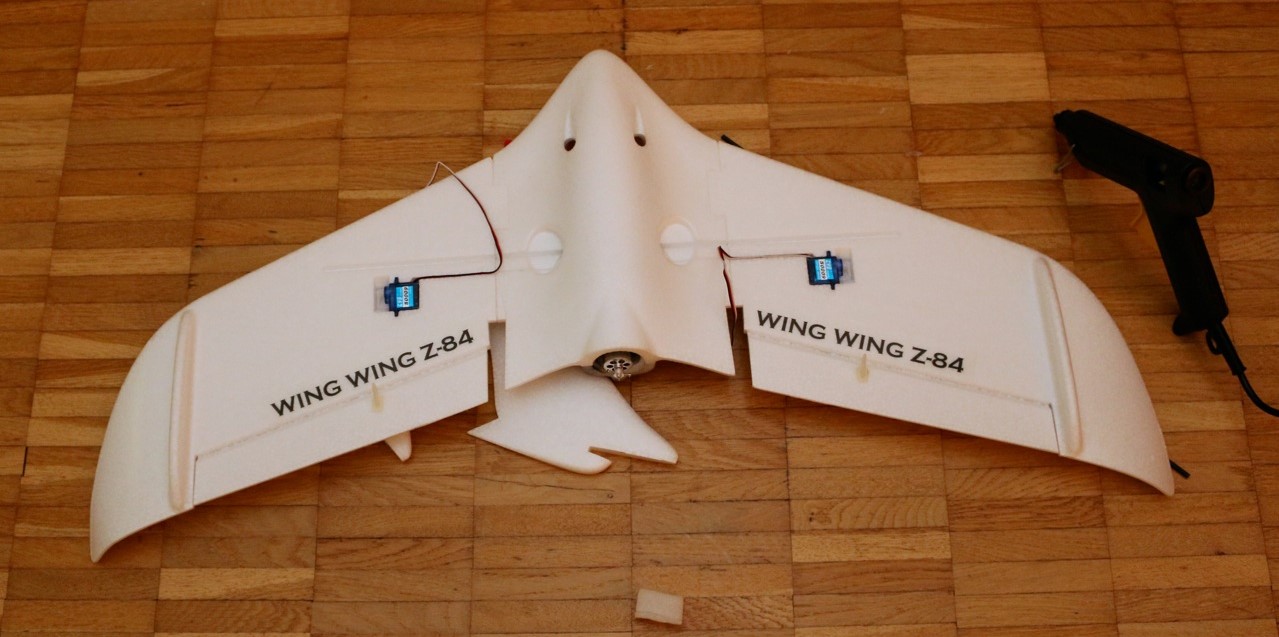
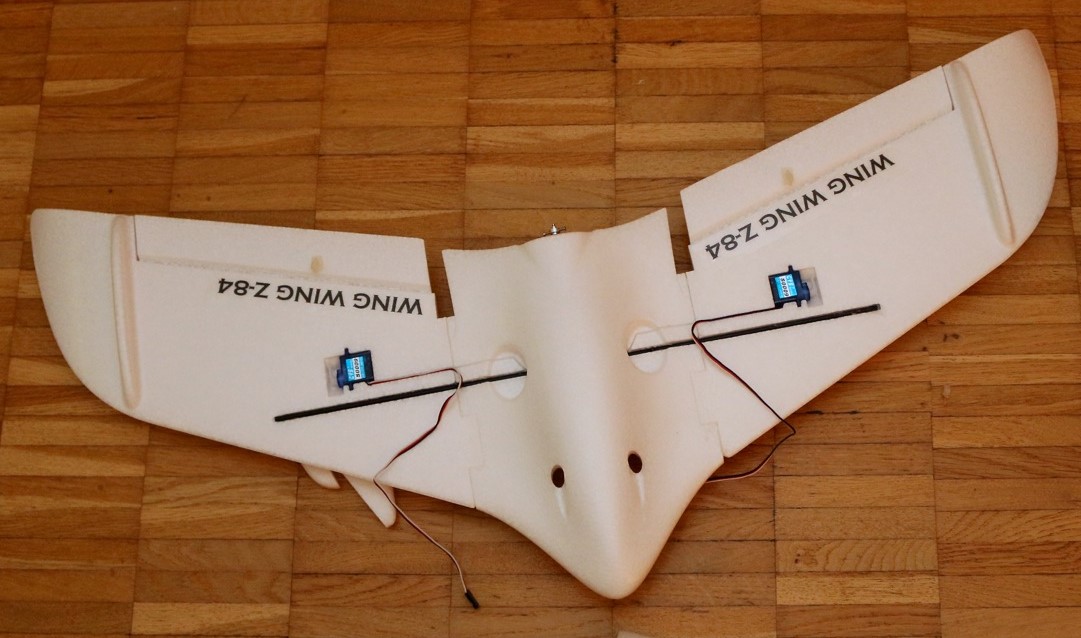
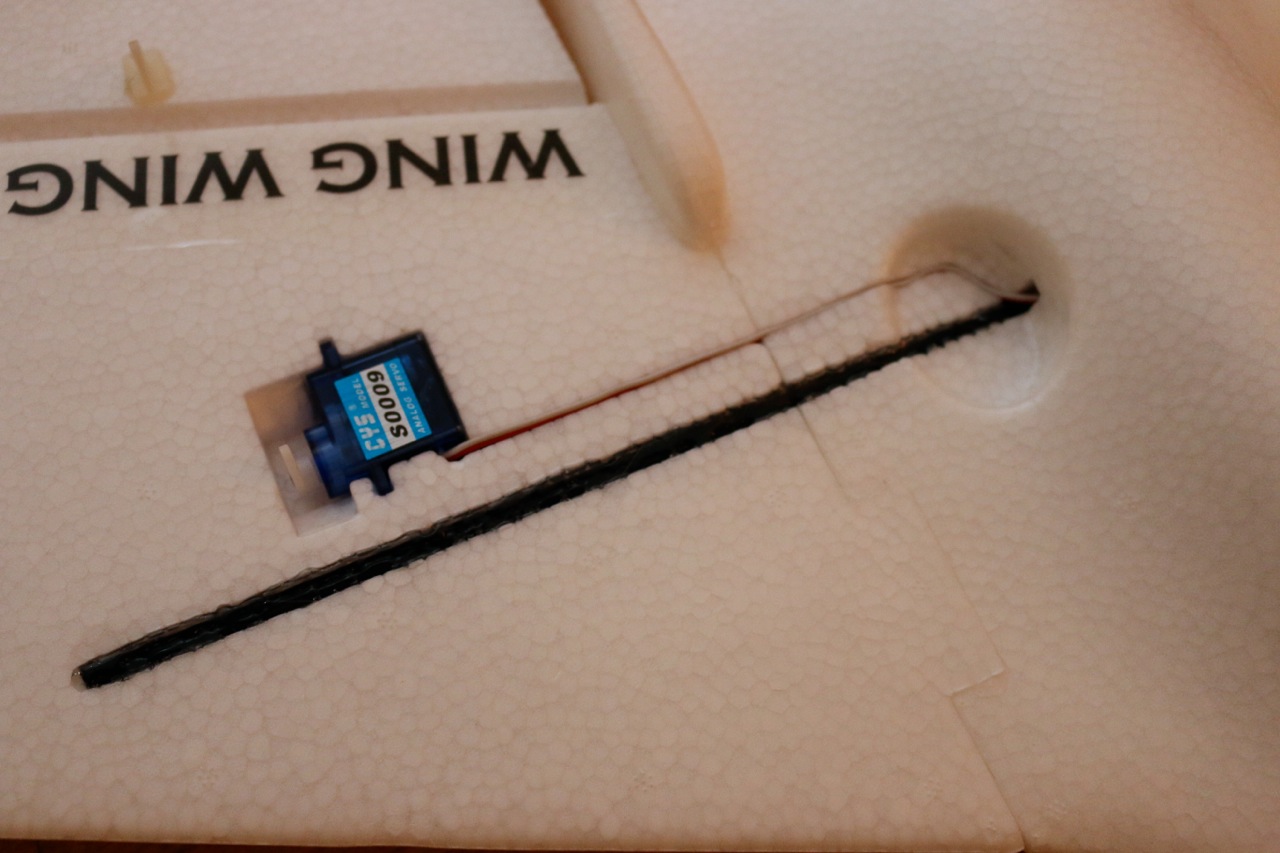
组装
- 下面的图片给出了关于装配过程的大致想法,这很简单,可以用热胶枪完成。
- 图示:

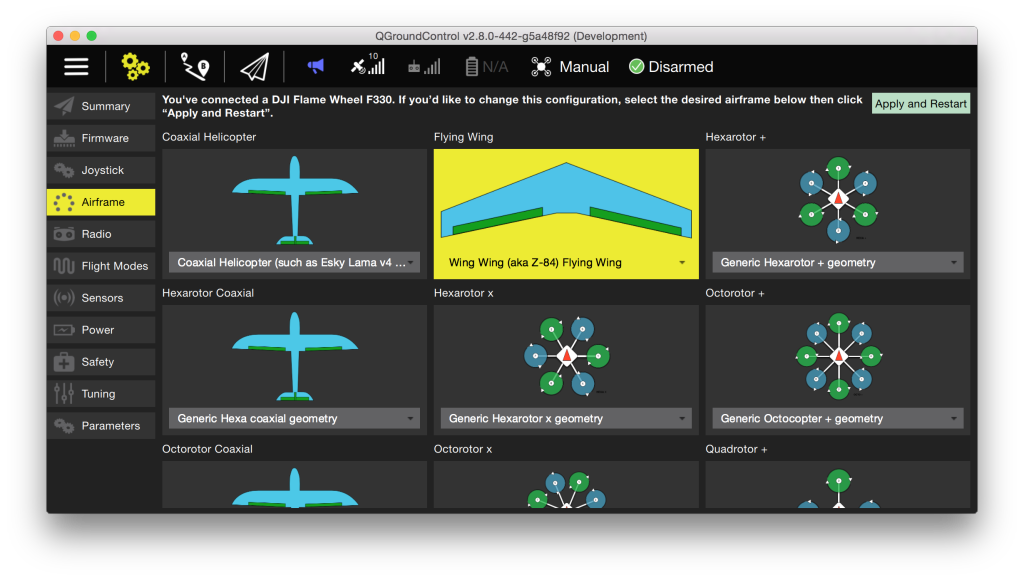
固件配置
- 在QGC机身配置的飞翼部分选择Z-84:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号