



















PX4用户指南-机身构建-无人车-traxxas_stampede
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-无人车-traxxas_stampede
说明:
- 选择该车辆是为了了解Pixhawk如何用于轮式平台。
- 我们选择使用Traxxas车辆因为它们非常受欢迎,它在RC社区中是一个非常强大的品牌。
- 我们的想法是开发一个平台,可以通过自动驾驶仪轻松控制轮式UGV。
视频:
图片:

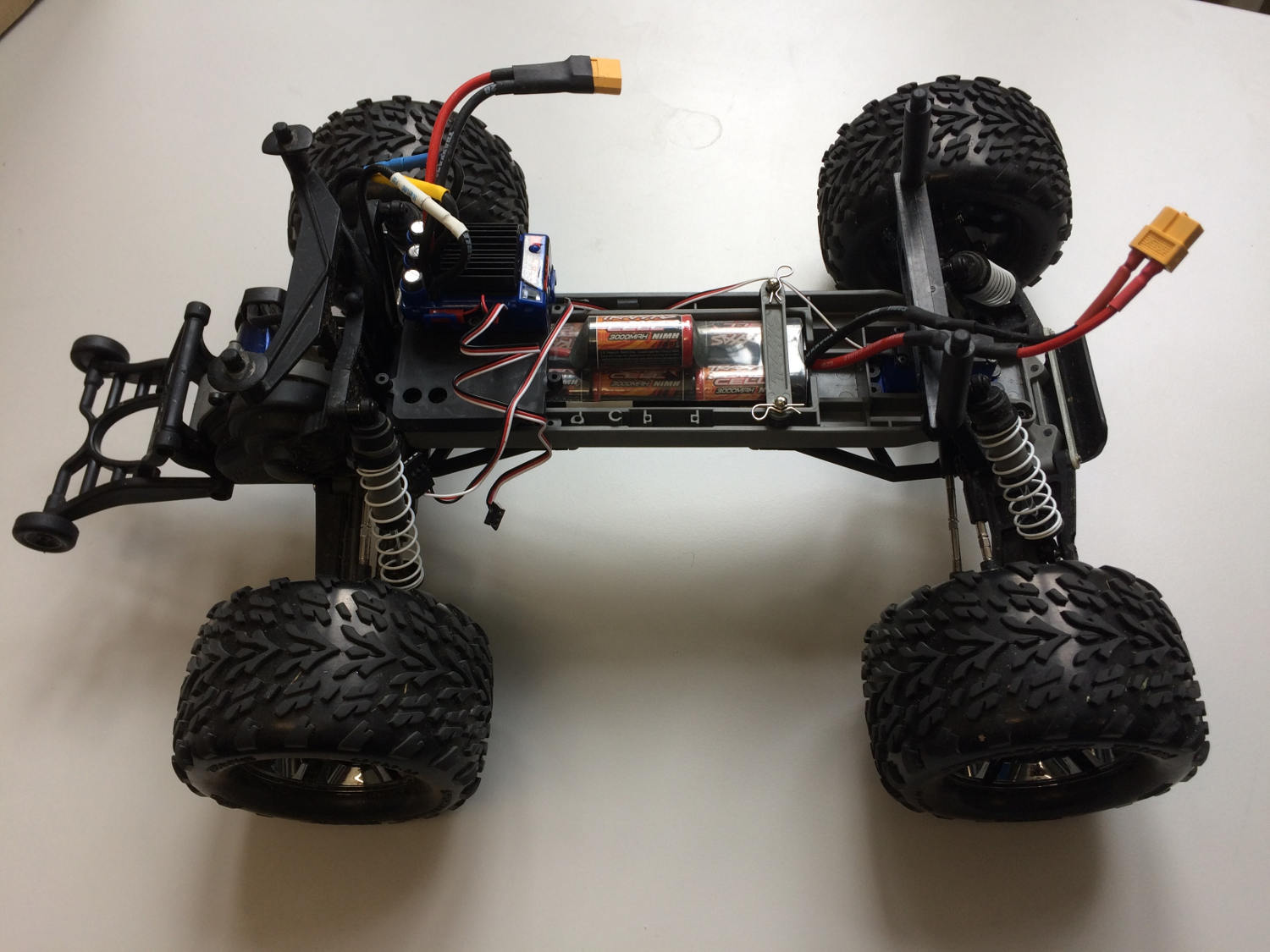
零件清单
- Traxxas Stampede除了顶部塑料盖外,所有这些都被使用。
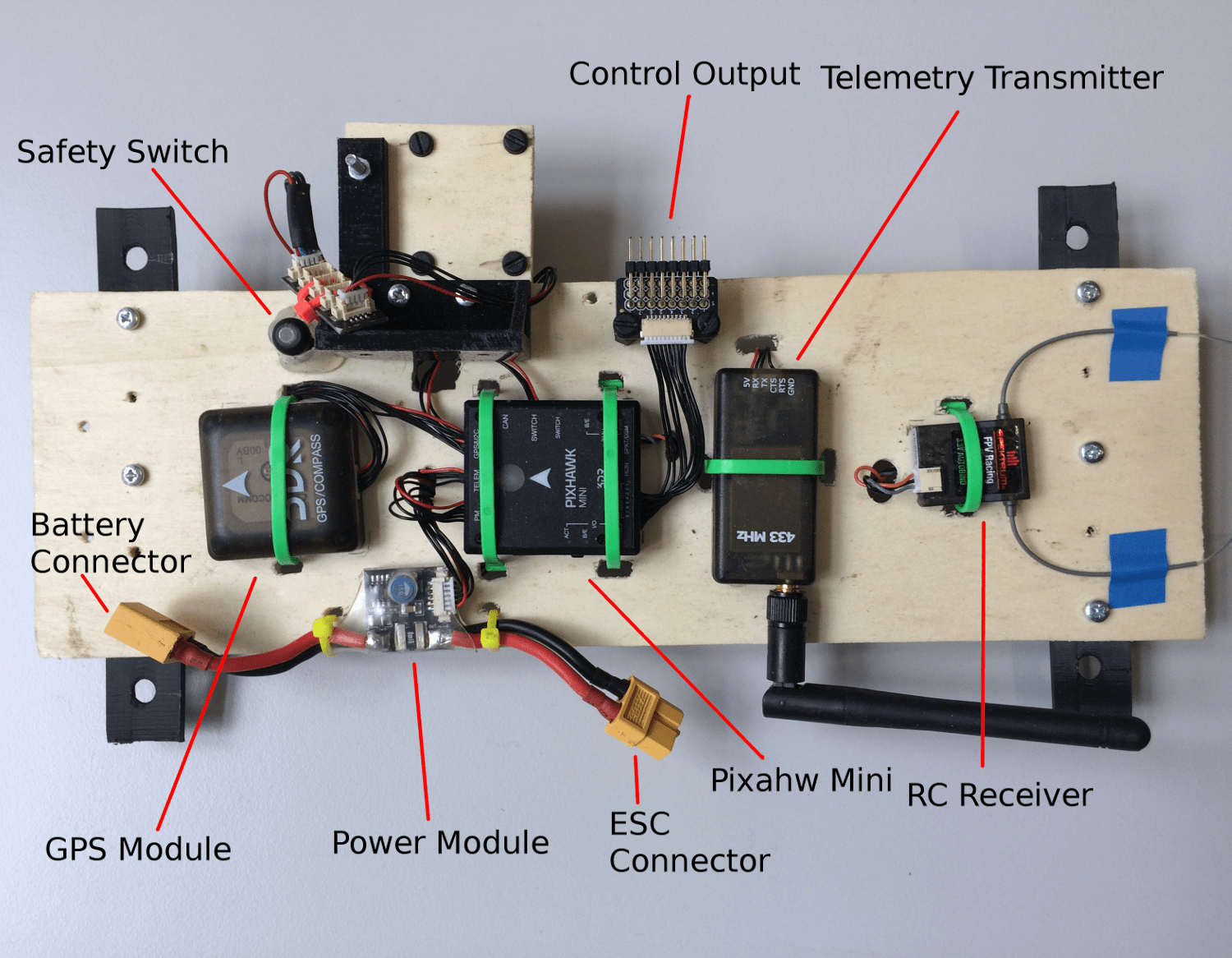
- Pixhawk Mini(已停产)
- 3DR 10S电源模块
- [3DR 433MHz遥测模块(欧盟)
- Spektrum Dxe控制器或其他兼容PX4的遥控器
- Spektrum Quad Race串行接收器具有多样性
- PX4Flow
组装:
- 该组件包括一个木制框架,所有自动驾驶仪部件都连接在该木制框架上。
- 测试表明,应该使用更好的隔振效果,尤其是Pixhawk和Flow模块。
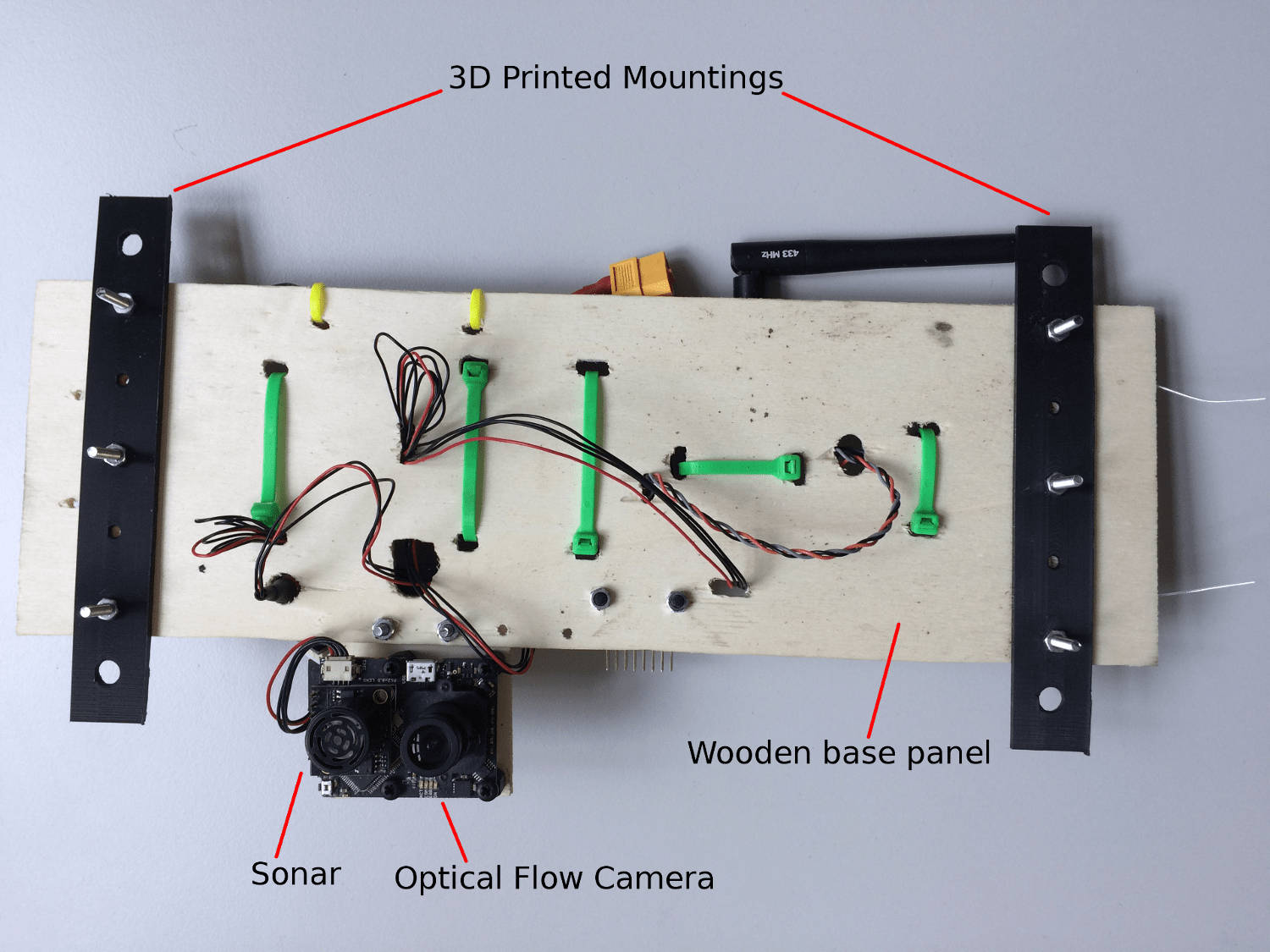

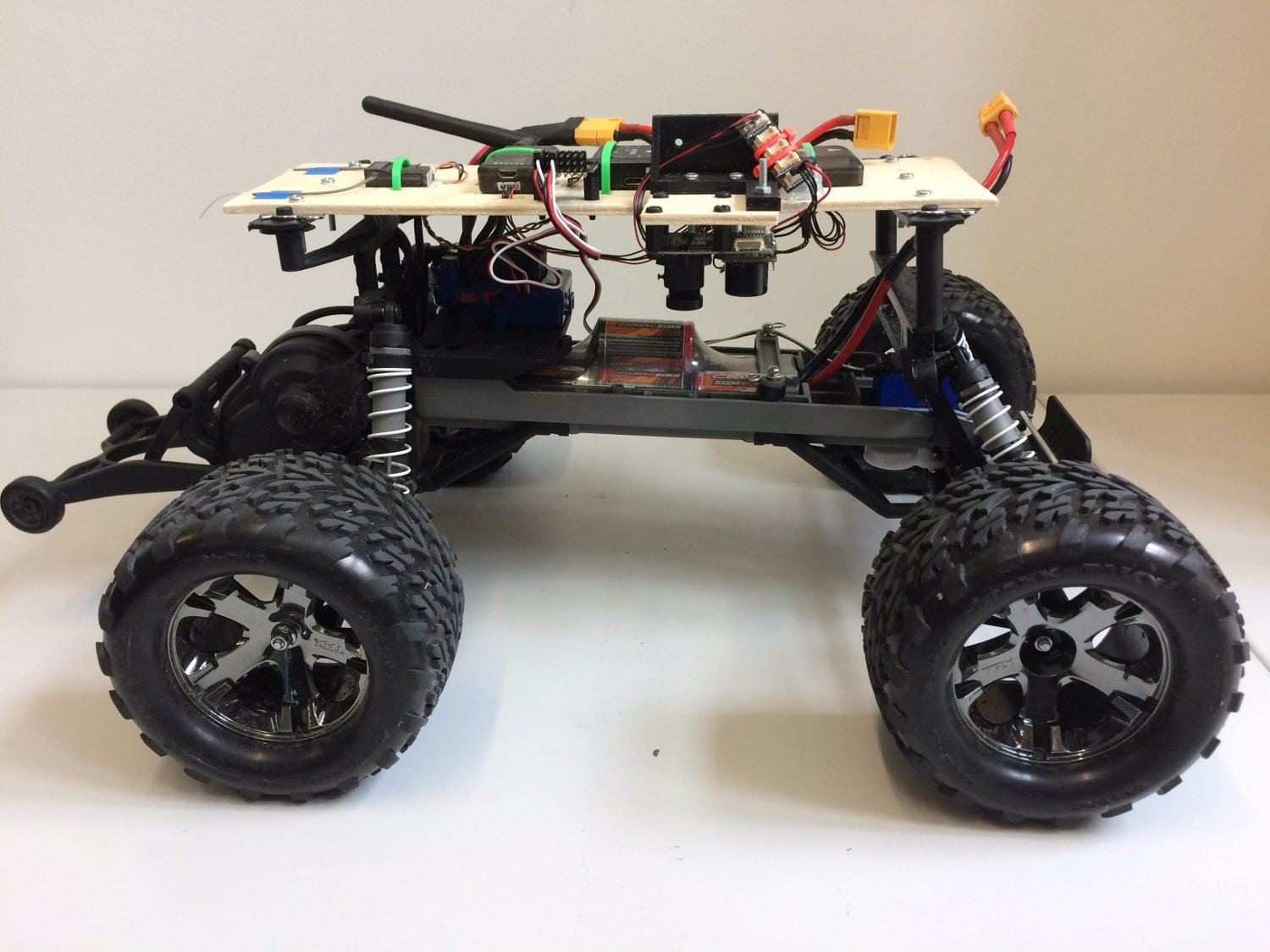
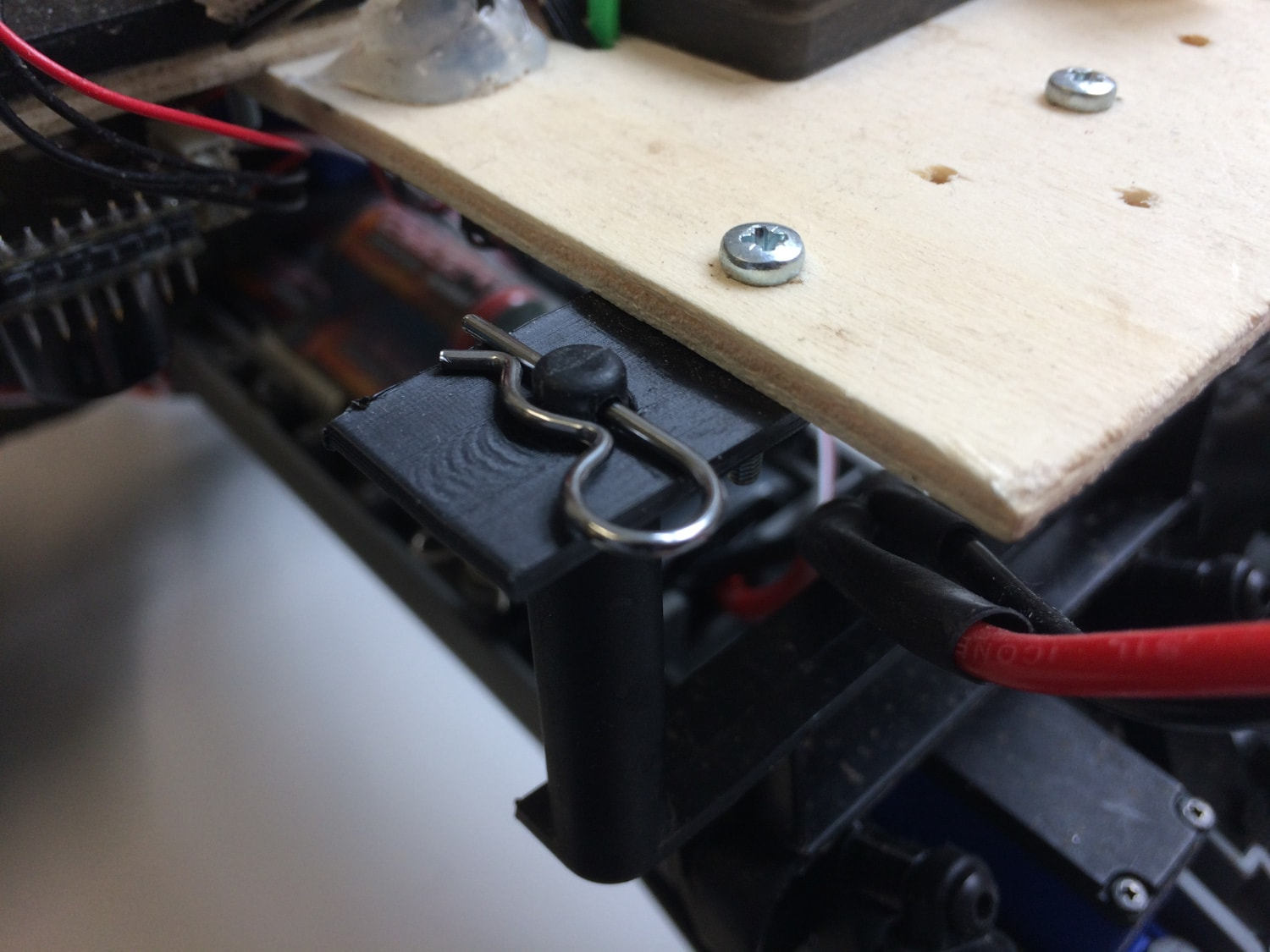
- 对于这种特殊的安装,我们选择夹子来连接上板。
- 两个支持是3D打印。 这里提供了CAD文件。
- 强烈建议将ESC设置为训练模式(参见Traxxas Stampede Manual),以便将功率降低到50%。
输出连接
| PWM Output | Actuator |
|---|---|
| MAIN2 | Steering servo |
| MAIN4 | ESC input |
配置:
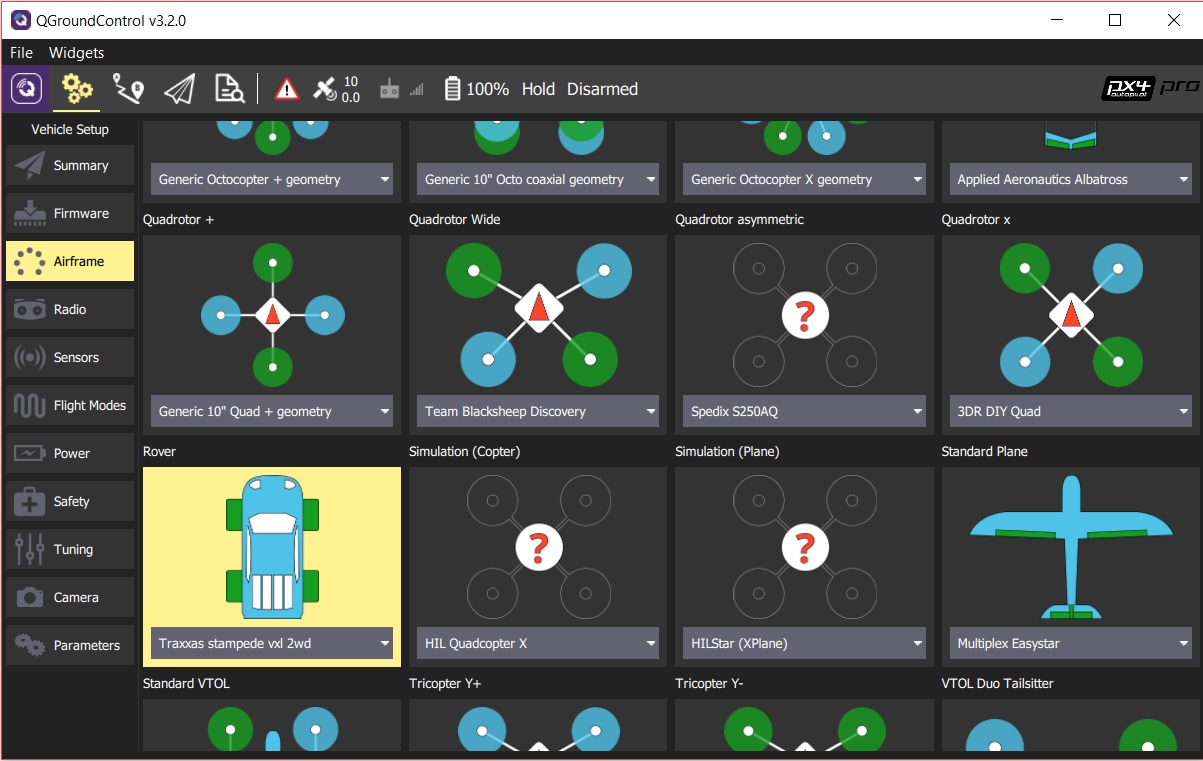
- 使用QGroundControl以与任何其他车辆相同的方式配置流浪者。
- 主要的流动站特定配置是设置正确的车身:
- 切换到QGroundControl中的Basic Configuration部分
- 选择“机身”选项卡。
- 向下滚动列表以查找rover图标。
- 从下拉列表中选择Traxxas stampede vxl 2wd
用法:
-
目前,PX4仅在连接RC遥控器时支持MISSION和MANUAL模式。
-
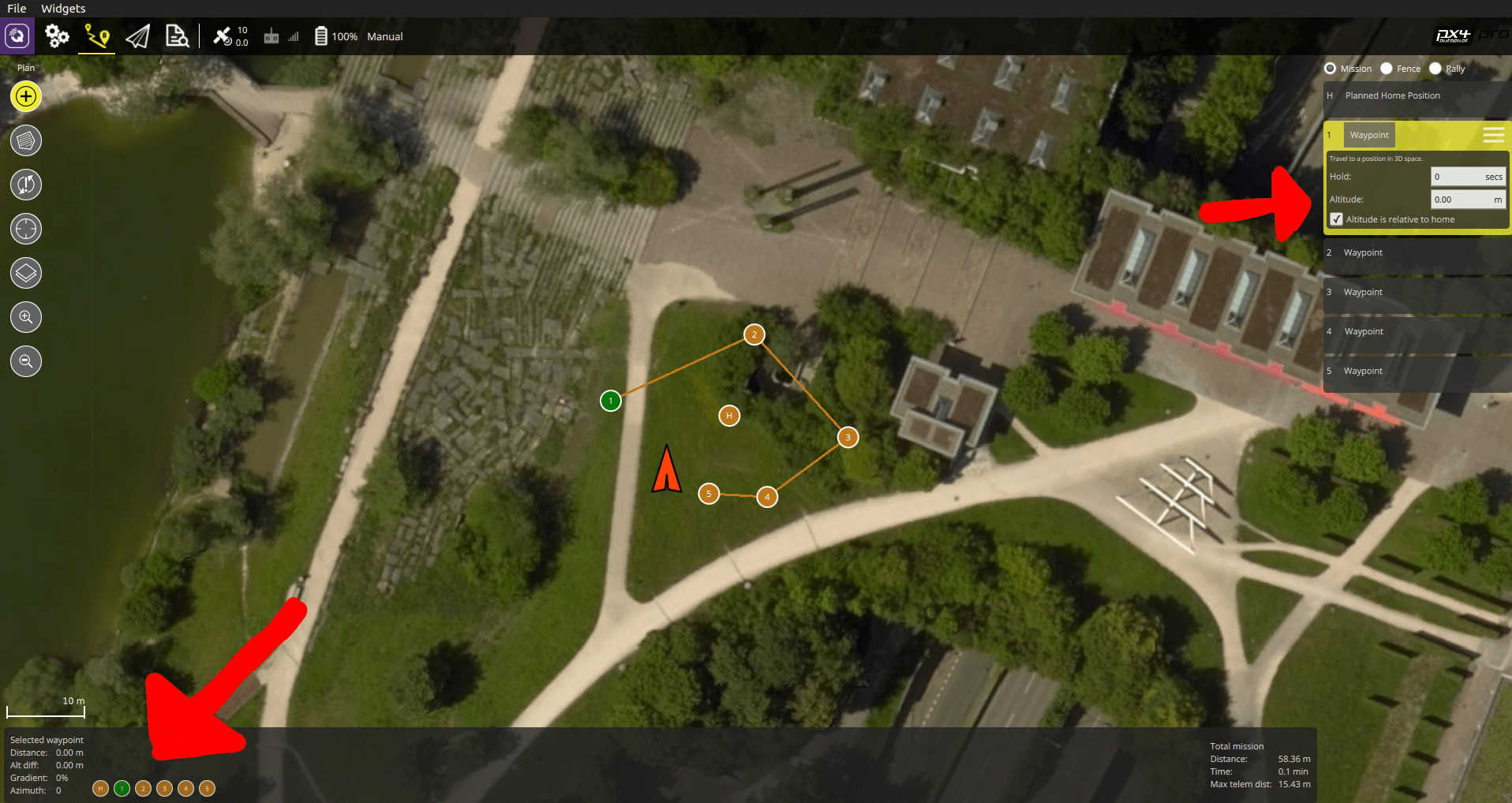
要使用任务模式,首先使用QGC将新任务上传到车辆。
-
然后,在解锁之前,选择MISSION,然后选择解锁。
-
执行仅由正常航路点组成的任务非常重要(即,没有起飞航点),将每个航路点的航路点高度设置为0以确保正确执行至关重要。
-
如果不这样做,将导致漫游车不断绕过航点。
-
正确的任务设置如下:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号