



















PX4用户指南-机身构建-垂直起降-vtol_quadplane_volantex_ranger_ex_pixhawk
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-垂直起降-vtol_quadplane_volantex_ranger_ex_pixhawk
说明:
- 介绍如何组装vtol_quadplane_volantex_ranger
QuadRanger VTOL
- QuadRanger VTOL是基于Volantex Ranger-Ex的标准尾翼飞机,已经改装了QuadCopter系统。
- Ranger-Ex是一款易于使用的FPV平台,可广泛使用。
- 它也可以从HobbyKing获得,它被重新命名为Quanum Observer。
- 等离子机身和2米EPO机翼使其成为坚固的机身,具有大量的有效载荷。
关键信息:
-
框架:Volantex Ranger-Ex或Quanum Observer
-
飞行控制器:Pixhawk
-
图示:

-
VTOL转换使飞机更重(包括LiPo在内约3.5千克)。
-
通过这种转换,飞机将以约65%的油门巡航。
-
建议的四轮装置可提供7.5千克的推力,机身可以飞行,总重量约为4.5千克。
-
这为FPV齿轮和摄像机等有效载荷留下了足够的有效载荷能力。
-
该转换旨在最大限度地减少对空气动力学的影响,并提供额外的强度,使机翼弯曲最小化。
硬件清单:
- Volantex Ranger-Ex or Quanum Observer
- 1200KV 530W motors
- 30A Speed Controllers
- 4s battery
- APC Electric 11x5 propellers
转换套件
-
The basic parts required are;
-
Pixhawk or compatible
-
Digital airspeed sensor
-
3DR Power module or compatible
-
GPS
-
有关Hobbyking EU和International仓库链接的完整零件清单,请参阅:QuadRanger-VTOL-partslist
-
下图描绘了一个机翼所需的部件。
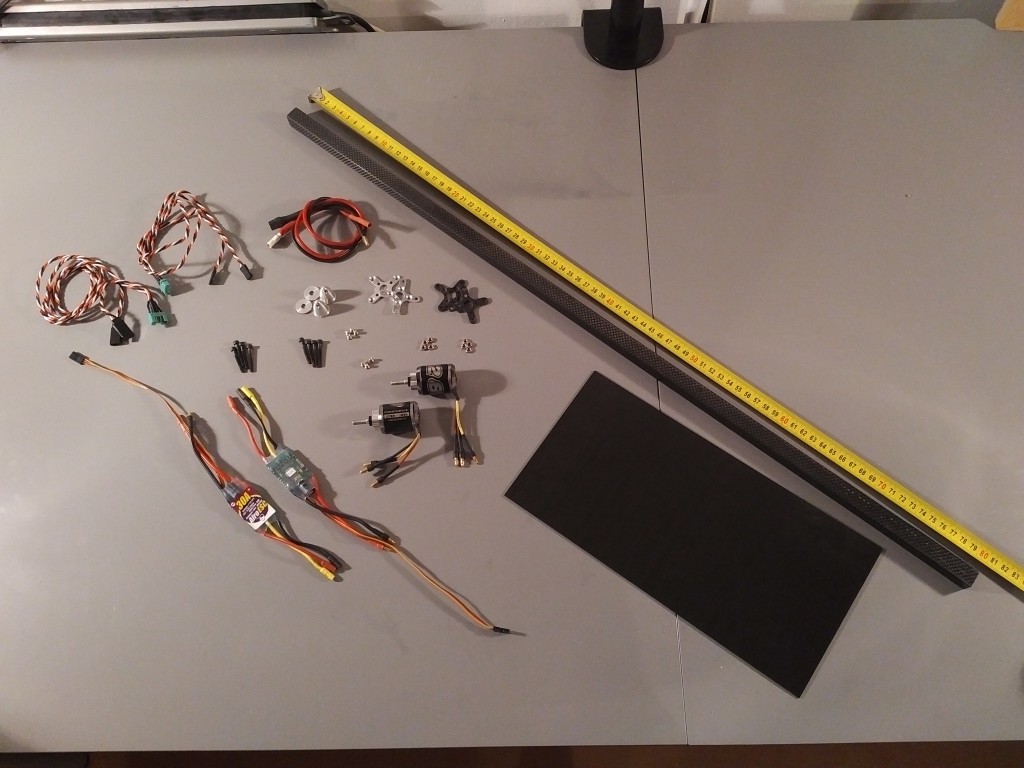
转换所需的工具是:
- A Dremel or similar rotary tool
- A hobby knife
- UHU POR glue
- CA glue
- Tape-line
- Tape

组合
-
视频:https://youtu.be/l_ppJ_HhAUQ
-
切割两个800毫米方形碳管,长度分别为570毫米和230毫米。
-
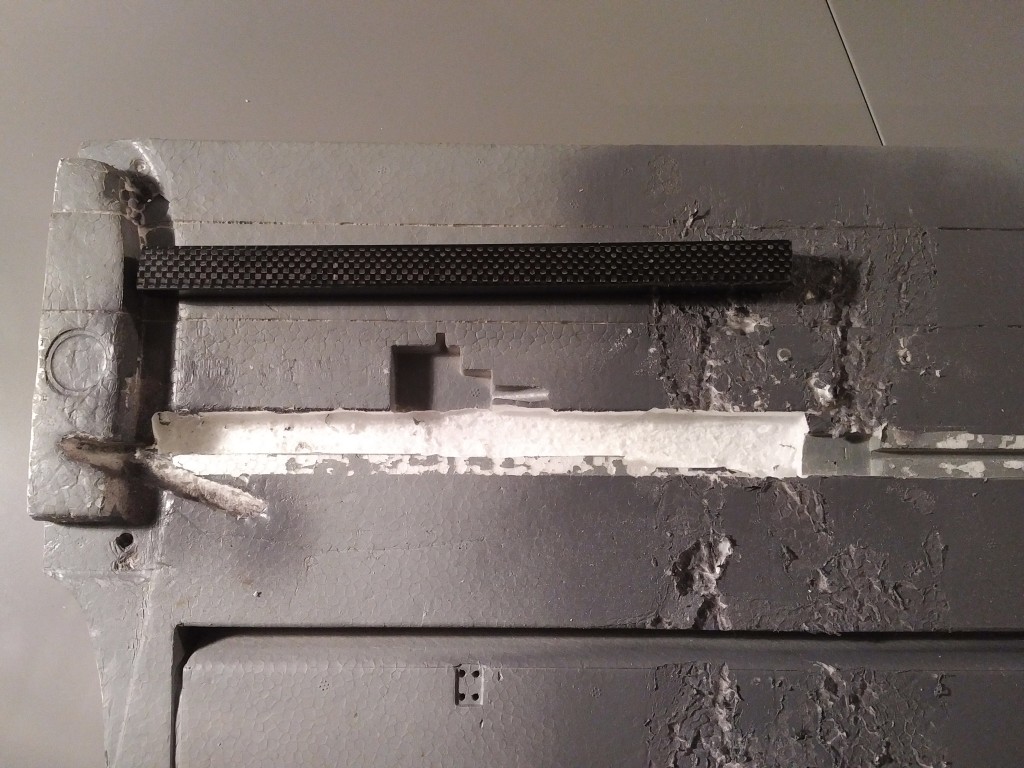
使用带有某种形式引导的旋转工具在聚苯乙烯泡沫塑料机翼中形成1.5厘米深的槽,以保持固定的深度。
-
槽应为一个230mm方形碳管的长度,深度和宽度。 它应该如下所示。
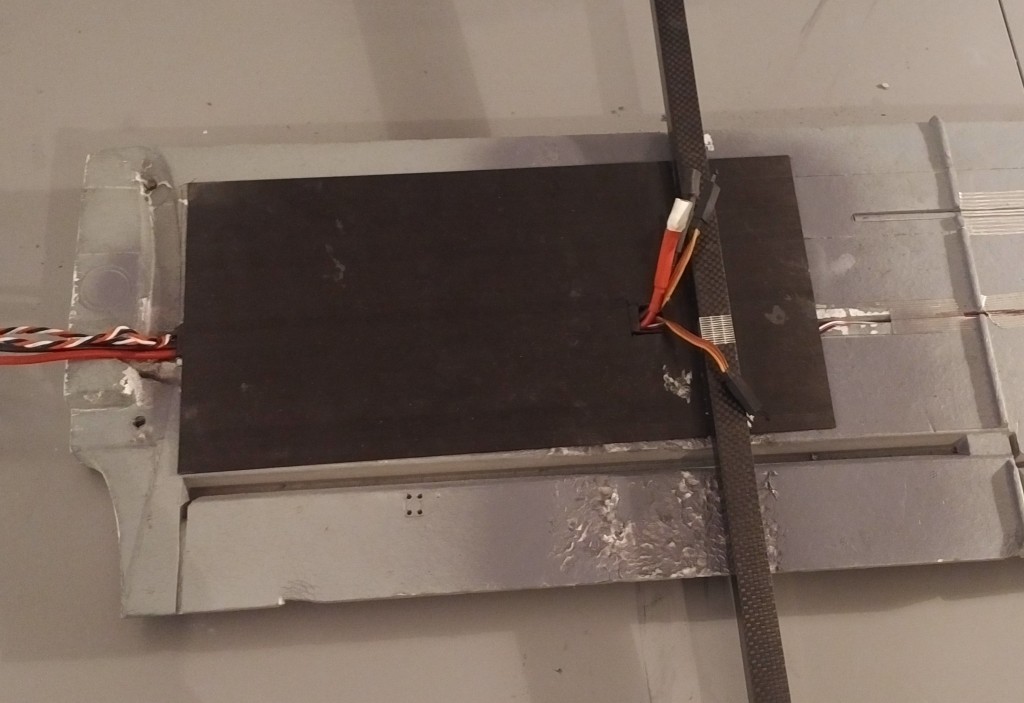
- 使用CA胶将300x150x1.5mm碳片粘合到230mm碳管上,并形成一个开口以穿过电线。
- 插入电源线和信号到ESC。
- 使用UHU POR将片材和碳管粘合到聚苯乙烯泡沫塑料机翼上,如下所示。
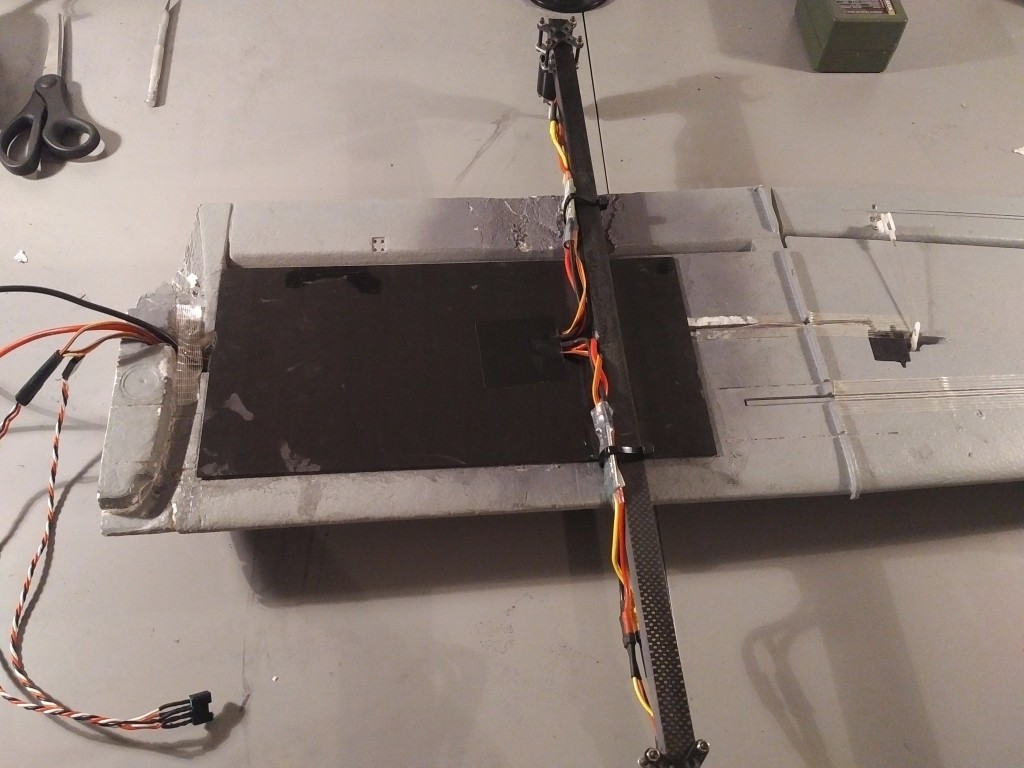
- 使用CA胶将570mm方形碳管粘合到碳片上。 它应位于距翅膀连接处285mm处。
- 管应相对于机翼的垂直区域居中。
- 它应该在两侧正好延伸165mm。
- 将电机座安装到电机上。
- 使用另一个电机安装板和4个M3x25mm螺钉将电机夹在方形碳管的末端,如下所示。
- 将带有扎带的ESC连接到碳管上。
- 使用Afro ESC时,请务必至少连接信号线和地线。
连线
- Pixhawk的输出应该像这样连接(方向看起来像“坐在飞机上”)。
| Port | Connection |
|---|---|
| MAIN 1 | Front right motor, CCW |
| MAIN 2 | Back left motor, CCW |
| MAIN 3 | Front left motor, CW |
| MAIN 4 | Back right motor, CW |
| AUX 1 | Left aileron |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | Throttle |
- 使用QGroundControl(cogwheel选项卡,左侧菜单中的最后一项)的PWM_OUTPUT组中的PWM_REV参数可以反转伺服方向
- 有关接线和配置的更多说明,请参阅:标准VTOL接线和配置
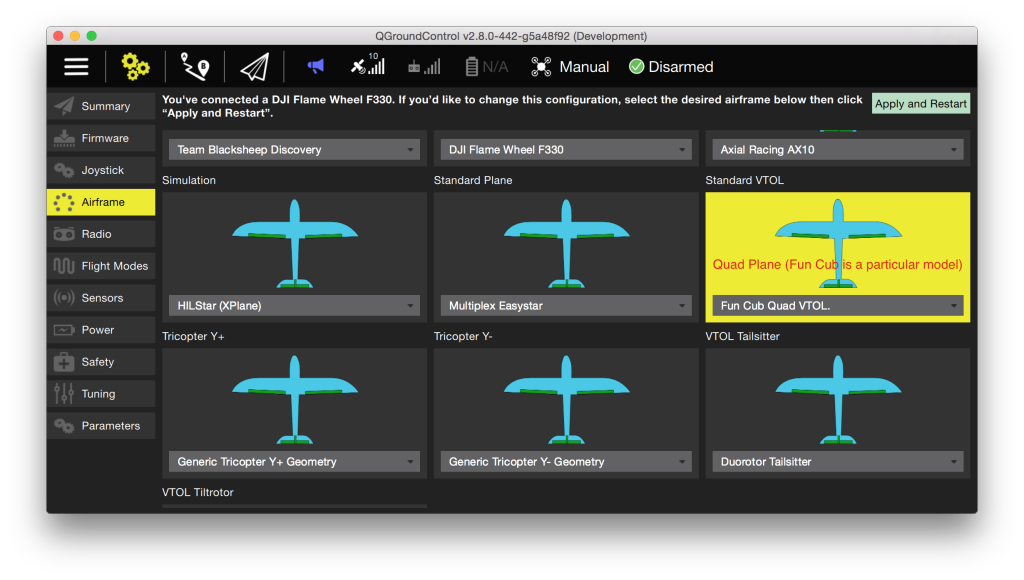
配置:
- 如下面的QGroundControl所示配置帧(不要忘记单击顶部的Apply和Restart)。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号