



















PX4用户指南-基本配置-空速计
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-基本配置-空速计
说明:
- 介绍如何校准空速计
空速计
- 空速校准需要读取具有0个空速的稳定基线以确定偏移。
- 将手放在皮托管上以阻挡任何风(如果不需要在室内校准传感器),然后用嘴吹入管中(表示完成校准)。
- 固定翼和VTOL车辆通常有一个空速传感器。
执行校准
-
- 启动QGroundControl并连接车辆。
-
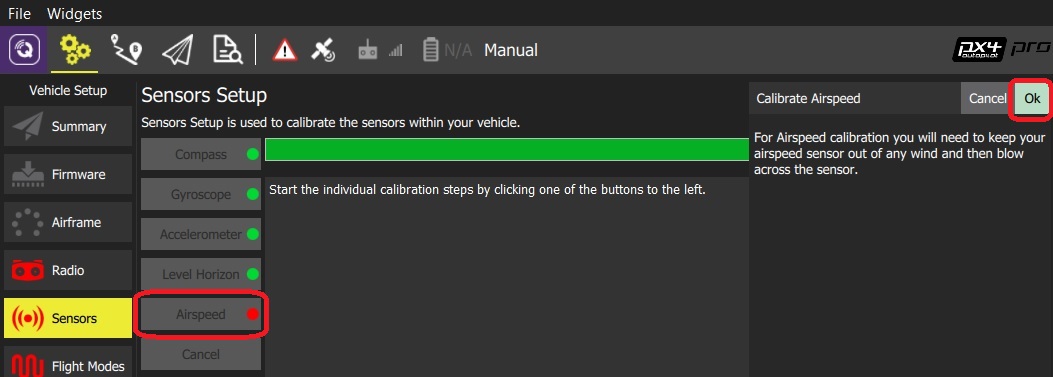
- 选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
-
- 单击空速传感器按钮。
-
- 将传感器与风隔离(即用手盖住传感器)。 注意不要阻挡任何孔。
-
- 单击“确定”开始校准。吹入皮托管的尖端以指示校准结束。
- 吹入管也是基本检查动态和静态端口是否正确安装。
- 如果它们被交换,那么当您吹入管中时,传感器将读取较大的负压差,并且校准将中止并出现错误。
- 在取下覆盖物之前等待2-3秒(校准在几秒钟后静默完成)
测试
- 校准后,快速测试是将手指压在皮托管的尖端并握住它。 您应该看到系统读取并保持正空速直到您释放。
更多信息
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号