



















PX4用户指南-基本配置-安全配置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-基本配置-安全配置
说明:
- 介绍如何进行安全设置
安全配置(Failsafes)
- PX4具有许多安全功能,可在出现问题时保护和恢复您的车辆:
- Failsafes,允许您指定可以安全飞行的区域和条件,以及触发故障安全时将执行的操作(例如,着陆,保持位置或返回指定点)。 最重要的故障安全设置在QGroundControl Safety Setup页面中配置。 其他必须通过参数配置。
- 安全开关,遥控器上的安全开关可用于在出现问题时立即停止电机或使车辆返回。
故障保护措施
- 每个故障保护都定义了自己的一组动作。 一些更常见的故障保护措施是:
| Action | Description |
|---|---|
| None/Disabled | 没有动作(故障保护将被忽略)。 |
| Warning | 将向QGroundControl发送警告消息。 |
| Hold mode | 车辆将进入保持模式。 对于多旋翼飞机,这意味着车辆将悬停,而对于固定/机翼,车辆将环绕。 |
| Return mode | 车辆将进入返回模式。 可以在返回主页设置(下方)中设置返回行为。 |
| Land mode | 车辆将进入着陆模式,并立即着陆。 |
| RC Auto Recovery (CASA Outback Challenge rules) | TBD |
| Terminate/Flight termination | 关闭所有控制器并将所有PWM输出设置为故障安全值(使用FAILSAFE变量在机身配置中定义)。 对于固定翼飞行器,这可能允许您将车辆滑行到安全位置。 |
| Lockdown | 停止电机(将它们设置为解除武装)。 这与使用kill开关相同。 |
-
通过切换模式可以从故障保护动作(如果原因得到修复)中恢复。
-
例如,在RC Loss故障保护导致车辆进入返回模式的情况下,如果RC恢复,您可以切换到位置模式并继续飞行。
-
如果在车辆响应另一个故障保护时发生故障保护(例如由于RC丢失而在返回模式下电池电量不足),则忽略第二个触发器的指定故障保护动作。
-
相反,该动作由单独的系统级别和车辆特定代码确定。 这可能导致车辆更改为手动模式,因此用户可以直接管理恢复。
QGroundControl安全设置
-
单击QGroundControl Gear图标(Vehicle Setup - 顶部工具栏),然后单击侧栏中的Safety,即可访问QGroundControl Safety Setup页面。
-
这包括最重要的故障安全设置(电池,RC丢失等)以及返回操作Return and Land的设置。
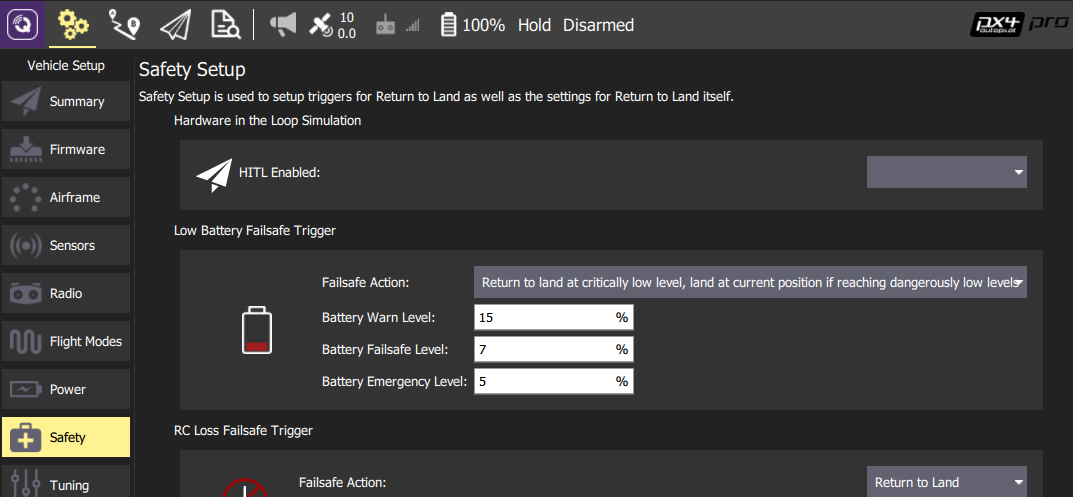
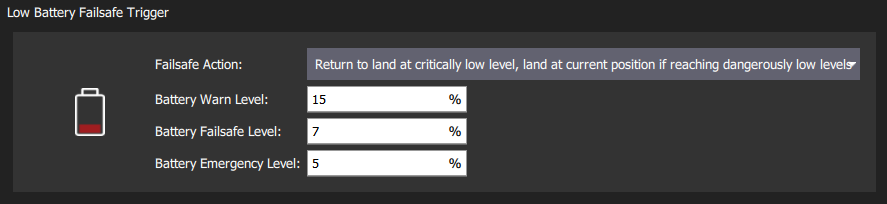
低电池故障保护
- 当电池容量降至一个(或更多警告)水平值以下时,将触发低电池故障保护。
-
最常见的配置是如上所述设置值和操作(使用警告>故障安全>紧急情况)。
-
使用此配置,故障保护将触发警告,然后返回,并在容量降至相应级别以下时最终着陆。
-
当达到电池故障安全级别故障安全级别时,还可以将故障安全操作设置为警告,返回或着陆。
-
设置和基础参数如下所示。
| Setting | Parameter | Description |
|---|---|---|
| Failsafe Action | COM_LOW_BAT_ACT | 当容量低于电池故障安全级别,或警告,然后返回,然后根据以下每个级别设置着陆时,警告,返回或着陆。 |
| Battery Warn Level | BAT_LOW_THR | 警告(或其他操作)的容量百分比。 |
| Battery Failsafe Level | BAT_CRIT_THR | 返回操作的容量百分比(或选择单个操作时的其他操作)。 |
| Battery Emergency Level | BAT_EMERGEN_THR | 触发Land(立即)动作的百分比容量。 |
RC失联故障保护
- 如果RC发送器链路丢失,则触发RC Loss故障保护。

- 设置和基础参数如下所示。
| Setting | Parameter | Description |
|---|---|---|
| RC Loss Timeout | COM_RC_LOSS_T | 在故障安全将触发之前丢失RC连接之后的时间量。 |
| Failsafe Action | NAV_RCL_ACT | Disabled, Loiter, Return, Land, RC Auto Recovery, Terminate, Lockdown. |
| RC Loss Loiter Time | NAV_RCL_LT | 如果故障保护动作(NAV_RCL_ACT)设置为CASA Outback Challenge规则,则设置RC丢失后的游荡时间。 |
数据链路丢失故障保护
- 如果遥测链路(与地面站的连接)丢失,则会触发数据链路丢失故障保护。

- 设置和基础参数如下所示。
| Setting | Parameter | Description |
|---|---|---|
| Data Link Loss Timeout | COM_DL_LOSS_T | 在故障安全将触发之前丢失数据连接之后的时间量。 |
| Failsafe Action | NAV_DLL_ACT | 禁用,保持模式,返回模式,陆地模式,数据链路自动恢复(CASA Outback Challenge规则),终止,锁定。 选择数据链路自动恢复(CASA Outback Challenge规则)操作还可以启用数据链路丢失参数。 |
地理围栏故障保护
-
地理围栏定义为原始位置周围的“虚拟”圆柱体。
-
如果车辆移动到半径之外或高于海拔高度,则会触发指定的故障安全措施。

-
设置和基础地理围栏参数如下所示。
| Setting | Parameter | Description |
|---|---|---|
| Action on breach | GF_ACTION | None, Warning, Hold mode, Return mode, Terminate. |
| Max Radius | GF_MAX_HOR_DIST | 地理围栏圆柱的水平半径。 如果为0,则禁用地理围栏。 |
| Max Altitude | GF_MAX_VER_DIST | 地理围栏的高度。 如果为0,则禁用地理围栏。 |
-
将GF_ACTION设置为终止将在违反围栏时终止车辆。
-
由于其固有的危险,使用CBRK_FLIGHTTERM禁用此功能,需要将其重置为0才能真正关闭系统。
-
以下设置也适用,但不会显示在QGC UI中。
| Setting | Parameter | Description |
|---|---|---|
| Geofence altitude mode | GF_ALTMODE | 使用的海拔高度参考:0 = WGS84,1 = AMSL |
| Geofence counter limit | GF_COUNT | 设置在触发地理围栏违规之前需要在围栏外进行多少次后续位置测量。 |
| Geofence source | GF_SOURCE | 设置位置源是估计全球位置还是直接来自GPS设备。 |
| Circuit breaker for flight termination | CBRK_FLIGHTTERM | 启用/禁用航班终止操作(默认情况下禁用)。 |
返回HOME设置
- 返回是一种常见的故障保护动作,它使返回模式使车辆返回原位。
- 本节介绍如何在返回后设置land/loiter行为。

- 设置和基础参数如下所示:
| Setting | Parameter | Description |
|---|---|---|
| Climb to altitude | RTL_RETURN_ALT | 车辆上升到返回航班的最小高度(如果低于它)。 |
| Return behaviour | Choice list of Return then: Land, Loiter and do not land, or Loiter and land after a specified time. | |
| Loiter Altitude | RTL_DESCEND_ALT | 如果选择了带有游荡者的返回,您还可以指定车辆保持的高度。 |
| Loiter Time | RTL_LAND_DELAY | 如果选择了返回,则选择了陆地,您还可以指定车辆将保持多长时间。 |
- 返回行为由RTL_LAND_DELAY定义。 如果为负,车辆将立即降落。 其他信息可在返回模式中找到。
着陆模式设置
- 当前位置的着陆是采用着陆模式的常见故障保护行动。
- 本节介绍如何设置着陆后车辆是否会自动锁定。 对于Multicopters(仅限),您可以另外设置下降率。

- 设置和基础参数如下所示:
| Setting | Parameter | Description |
|---|---|---|
| Disarm After | COM_DISARM_LAND | 选择复选框以指定车辆在着陆后将锁定,并在着陆之前输入延迟,然后锁定(必须为非零)。/td> |
| Landing Descent Rate | MPC_LAND_SPEED | 下降率(仅限MC) |
其他故障安全设置
- 本节包含有关无法通过QGroundControl Safety Setup页面配置的故障安全设置的信息。
位置(GPS)丢失故障保护
-
如果在需要可接受的位置估计的模式下PX4位置估计的质量低于可接受水平(这可能由GPS损失引起),则触发位置丢失故障保护。
-
根据是否假定RC控制可用(以及高度信息),COM_POSCTL_NAVL控制故障动作:
- 0:遥控器可用。 如果有高度估计值,则切换到海拔高度模式,否则为稳定模式。
- 1:遥控器不可用。 如果有高度估计值,请切换到着陆模式,否则输入飞行终止。
-
固定的Wing车辆另外还有一个参数(NAV_GPSF_LT),用于定义在尝试着陆之前失去位置后他们将挥动多久(圈)。
-
下面显示的所有车辆的相关参数(另请参阅GPS故障导航参数):
| Parameter | Description |
|---|---|
| COM_POS_FS_DELAY | 触发故障保护之前失去位置后的延迟。 |
| COM_POSCTL_NAVL | 任务期间的位置控制导航损失响应。 值:0 - 假设使用RC,1 - 假设没有RC。 |
| CBRK_GPSFAIL | 可用于禁用GPS故障检测的断路器。 |
| CBRK_VELPOSERR | 用于位置错误检查的断路器(禁用所有模式下的错误检查)。 |
- 仅影响固定翼车辆的参数:
| Parameter | Description |
|---|---|
| NAV_GPSF_LT | 闲暇时间(等待GPS进入航班终止前恢复)。 设置为0以禁用。 |
| NAV_GPSF_P | 盘旋时固定俯仰角。 |
| NAV_GPSF_R | 盘旋时固定滚动/倾斜角度。 |
| NAV_GPSF_TR | 盘旋时推力。 |
车外控制丢失故障保护
- 如果在车外控制下车外链路丢失,则会触发Offboard Loss Failsafe。
- 可以基于是否还存在可用的RC连接来指定不同的故障保护行为。
- 相关参数如下所示:
| Parameter | Description |
|---|---|
| COM_OF_LOSS_T | 在触发故障保护之前失去外接连接后延迟。 |
| COM_OBL_ACT | 如果没有可用的RC,则出现故障保护动作:陆地模式,保持模式,返回模式。 |
| COM_OBL_RC_ACT | 如果RC可用,则出现故障保护动作:位置模式,高度模式,手动模式,返回模式,着陆模式,保持模式。 |
任务失败故障保护
- 任务失败安全检查可防止先前的任务在新的起飞位置启动,或者它太大(航点之间的距离太大)。
- 故障保护措施是不会执行任务。
- 相关参数如下所示:
| Parameter | Description |
|---|---|
| MIS_DIST_1WP | 如果当前航点远离起始位置的此值,则不会启动任务。 如果值为0或更小,则禁用。 |
| MIS_DIST_WPS | 如果两个后续航路点之间的任何距离大于此值,则不会启动任务。 |
交通规避失败保护
- Traffic Avoidance Failsafe允许PX4响应转发器数据(例如来自ADSB转发器)。
- 相关参数如下所示:
| Parameter | Description |
|---|---|
| NAV_TRAFF_AVOID | 设置故障保护操作:已禁用,警告,返回模式,着陆模式。 |
自适应QuadChute故障安全
- 当推进器电机发生故障(或空速传感器)和VTOL车辆在固定翼模式下无法达到所需的高度设定点时,故障安全。
- 如果触发,车辆将转换到多旋翼模式并进入故障安全返回模式。
- 相关参数如下所示:
| Parameter | Description |
|---|---|
| VT_FW_ALT_ERR | 固定翼飞行的最大负高度误差。 如果高度下降超过高于设定点的此值,车辆将转换回MC模式并进入故障安全RTL。 |
安全开关
- 安全开关允许您立即停止所有电机或从遥控发射器返回车辆(如果您失去对车辆的控制,这可能比允许它继续飞行更好)。
- 安全开关可以作为QGroundControl飞行模式设置的一部分启用。
- 本节列出了可用的安全开关。
停止开关
- 一个停止开关立即停止所有电机输出(如果飞行的车辆将开始下降)。 车辆未撤防,如果开关恢复,电机将重新启动。
锁定/解锁开关
- 锁定/解锁开关是默认的摇杆锁定/解锁机制的替代品(并且用于相同的目的:确保在电机启动/停止之前涉及有意的步骤)。
- 它可能优先使用默认机制,因为:
- 优选的是开关超过摇杆运动(例如,如果在另一个自动驾驶仪上使用摇杆)。
- 它避免了在一定的摇杆运动中意外触发空中锁定/解锁。
- 没有延迟(它会立即作出反应)。
- 锁定/解锁开关立即解除(停止)适用于那些支持飞行中解除武装的飞行模式的电机。 这包括:
Manual mode
Acro mode
Stabilized
Rattitude- 对于不支持在飞行中撤防的模式,在飞行期间忽略开关,但可以在检测到着陆后使用。
- 这包括位置模式和自主模式(例如任务,着陆等)。
返回开关
- 返回开关可用于立即启用返回模式。
更多信息
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号