



















PX4用户指南-机身构建-垂直起降-vtol_quadplane_fun_cub_vtol_pixhawk
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-垂直起降-vtol_quadplane_fun_cub_vtol_pixhawk
说明:
- 介绍如何实现FunCub QuadPlane
- Fun Cub QuadPlane VTOL是一款标准的尾翼飞机(Multiplex FunCub),已经改装了QuadCopter系统。
关键信息:
-
框架:Multiplex FunCub
-
飞行控制器:Pixhawk
-
图示:

-
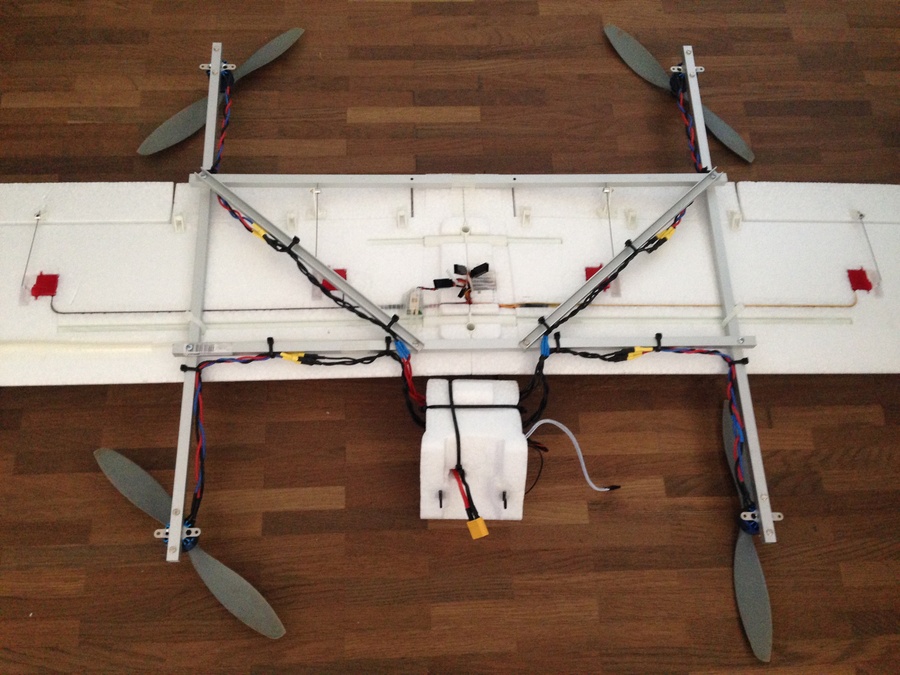
Fun Cub是一款相对实惠的飞机,相对容易飞行。 转换后,飞机明显更重,空气动力学更小。
-
它仍然飞得很好,但在向前飞行中需要大约75%的油门。
材料清单
-
实际的平面看起来大致如上图所示(其他类似的模型也可以正常工作
-
这是一个Multiplex Fun Cub)。
-
所需的最小设备是:
- Multiplex FunCub (or similar)
- Pixhawk or compatible
- Digital airspeed sensor
- 900 kV motors (e.g. Iris propulsion set - motors and ESC)
- 10" props for quad motors (10x45 or 10x47)
- 10" prop for fixed-wing motor (10×7)
- GPS module
- 4S battery
- Aluminum frame for mounting the quad motors (10x10mm square tube, 1mm wall thickness)
- TOW is ~2.3kg with a 4200mAh 4S battery
结构:
- 该结构由铝制吊杆制成,如下所示。

连线:
- Pixhawk的输出应该像这样连接(方向看起来像“坐在飞机上”)。
- 使用QGroundControl(cogwheel选项卡,左侧菜单中的最后一项)的PWM_OUTPUT组中的PWM_REV参数可以反转伺服方向
| Port | Connection |
|---|---|
| MAIN 1 | Front right motor (CCW) |
| MAIN 2 | Back left motor (CCW) |
| MAIN 3 | Front left motor (CW) |
| MAIN 4 | Back right motor (CW) |
| AUX 1 | Left aileron TODO |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | Throttle |
- 有关接线和配置的更多说明,请参阅:标准VTOL接线和配置。
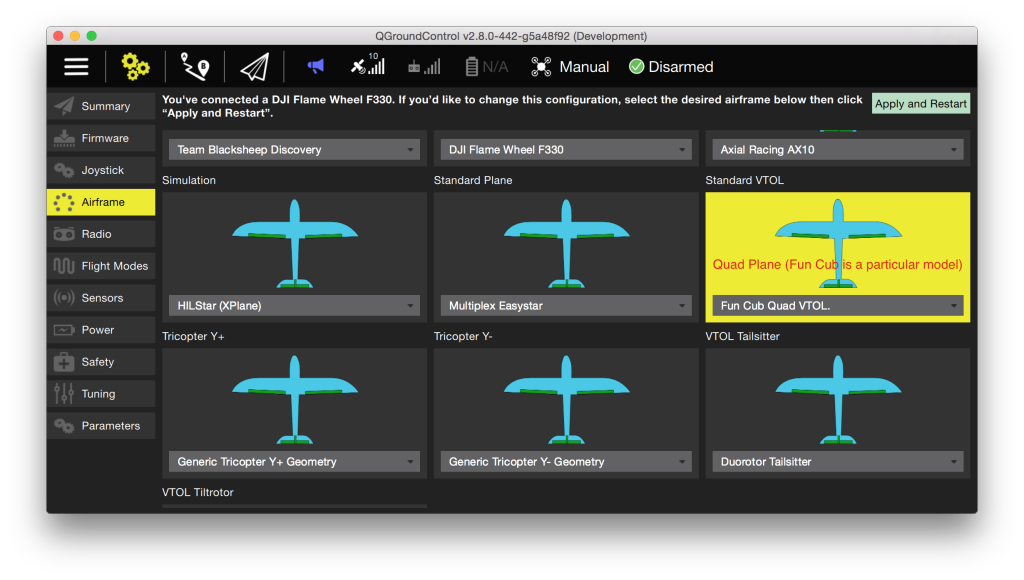
配置:
- 如下面的QGroundControl所示配置帧(不要忘记单击顶部的Apply和Restart)。
视频:
支持:
- 如果您对VTOL转换或配置有任何疑问,请访问http://discuss.px4.io/c/vtol。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号