



















PX4用户指南-飞行-任务
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-飞行-任务
说明:
- 介绍如何规划任务
规划任务:
-
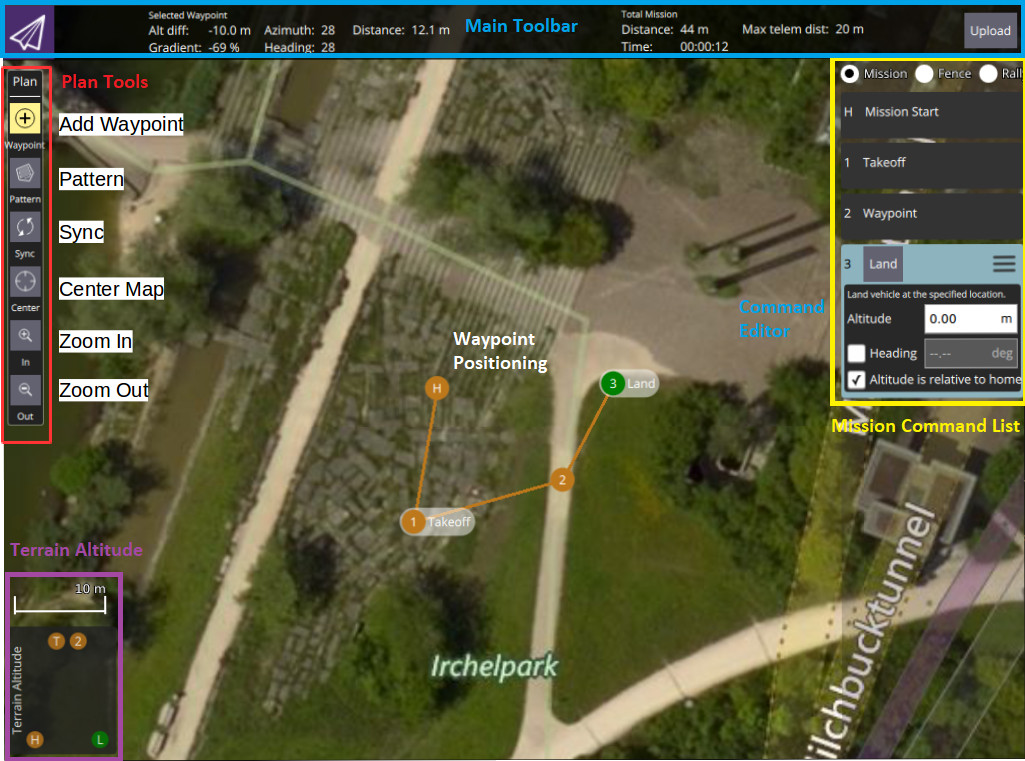
手动规划任务非常简单:
- 切换到任务视图
- 选择左上角的添加航点(“加号”)图标。
- 单击地图以添加航点。
- 使用右侧的航点列表修改航点参数/类型底部的高度指示器提供每个航点的相对高度感。
- 完成后,单击上传按钮(右上角)将任务发送到车辆。
-
您还可以使用“模式”工具自动创建测量网格。
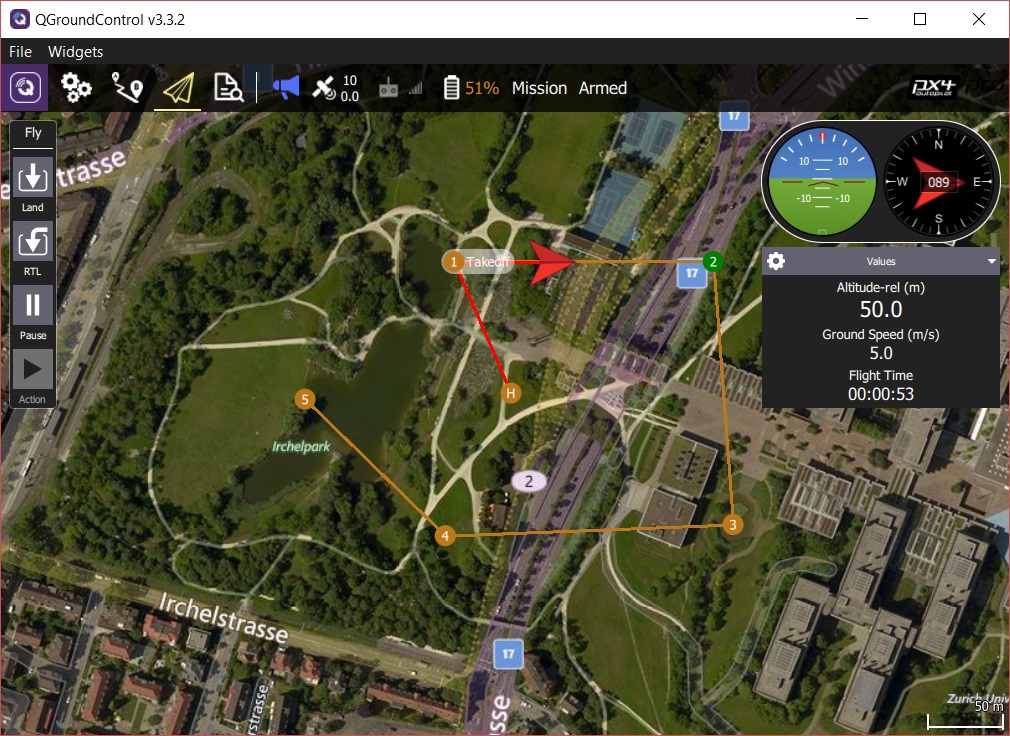
飞行任务
- 上传任务后,切换到航班视图。
- 任务以便于跟踪进度的方式显示(在此视图中无法修改)。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号