



















PX4用户指南-基本配置-加速度计
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-基本配置-加速度计
说明:
- 介绍如何校准加速度计
加速度计
-
QGroundControl将引导您以多种方向放置和保持您的车辆(系统将提示您何时在不同位置之间移动)。
-
这类似于罗盘校准,除了在每个方向上托架车辆(而不是旋转它)。
执行校准
-
- 启动QGroundControl并连接车辆。
-
- 选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
-
- 单击加速计传感器按钮。
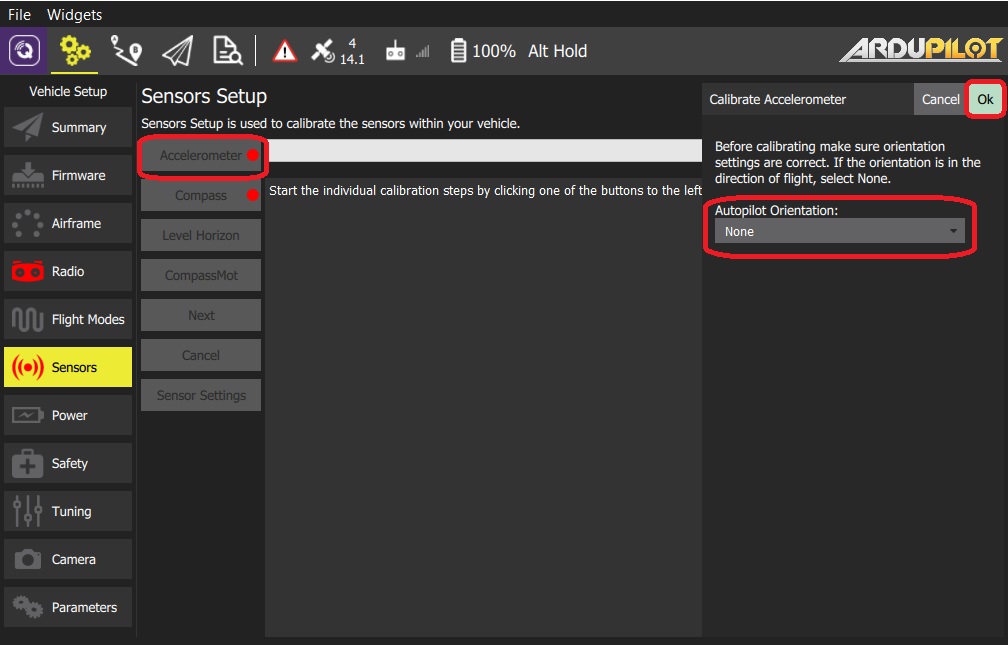
- 您应该已经设置了自动驾驶仪方向。 如果没有,您也可以在此处进行设置。
-
- 单击“确定”开始校准。
-
- 根据屏幕上的图像定位车辆。 一旦提示(方向图像变为黄色),请保持车辆静止。
- 完成当前方向的校准后,屏幕上的相关图像将变为绿色。
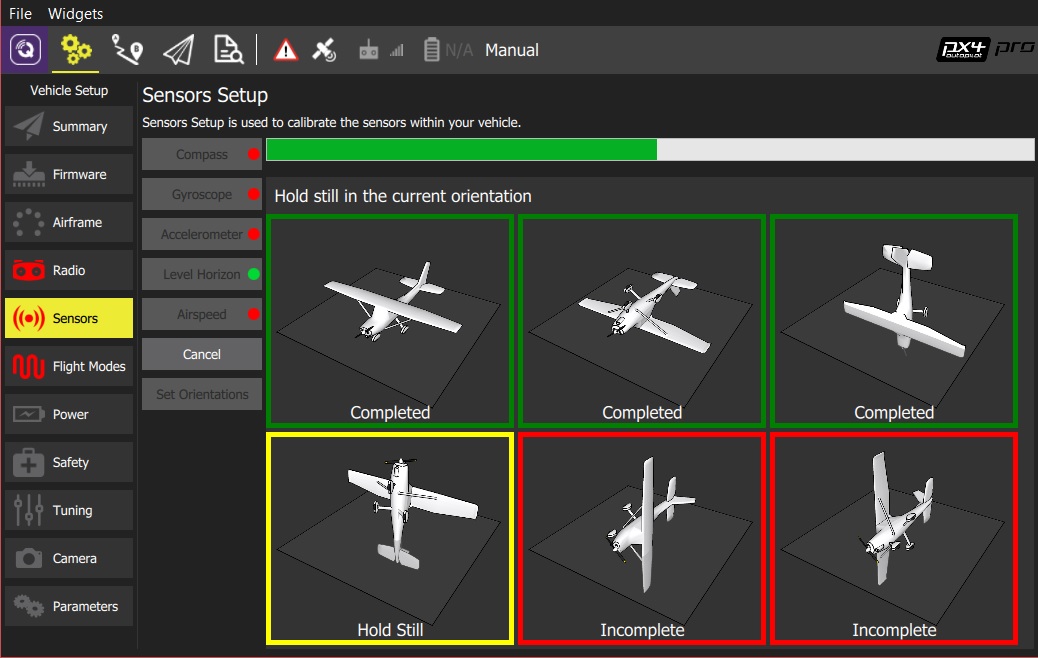
- 对所有车辆方向重复校准过程。
- 一旦您在所有位置校准了车辆,QGroundControl将显示校准完成(所有方向图像将以绿色显示,进度条将完全填满)。
- 然后,您可以继续下一个传感器。
更多信息
- QGroundControl用户指南>传感器
- PX4设置视频 - @ 1m46s(Youtube) https://youtu.be/91VGmdSlbo4?t=1m46s
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号