



















PX4用户指南-机身构建-多旋翼 -robocat_270_pixracer
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-多旋翼 -robocat_270_pixracer
说明:
- Robocat 270是一种小型四轴飞行器设计,相当于巡航而不是赛车,仍然是Pixracer自动驾驶仪的完美试验基础。
- 它比典型的250赛车更重,但提供了大量的空间和更大的电池,最高可达3S/2200mAh。
- 它是一款适合初学者的坚固小型四轴飞行器,对于年龄较大的专业人士来说也非常明显。
- 它非常简单:Robocat,带有PX4软件的Pixracer和QGroundControl地面站:构建,校准和飞行!
安装和接线

- Robocat 270框架套件有多种来源可供选择。两种版本:玻璃纤维或碳纤维。
- 后者采用各种铝制支架,而不是采用玻璃纤维版本提供的易碎塑料。

- 所示套件配备EMAX MT2204电机,EMAX 12A ESC,预装有SimonK和6045碳纤维道具。
- 考虑到价格,这是相当便宜而不是顶级品质,但相当不错。
- 有经验的飞行员,不是按预算,宁愿使用例如 Tiger Motors和更快的ESC,甚至CAN版本都可以与Pixracer /PX4包一起使用。
- 那些基于CAN的FOC/矢量控制ESC可以大大提高效率和可靠性。
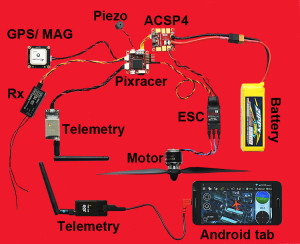
- 第一步应该是将所有部件连接到测试之前,然后再将它们安装到框架上。
- 有关接线详情,请参阅Pixracer说明指南。
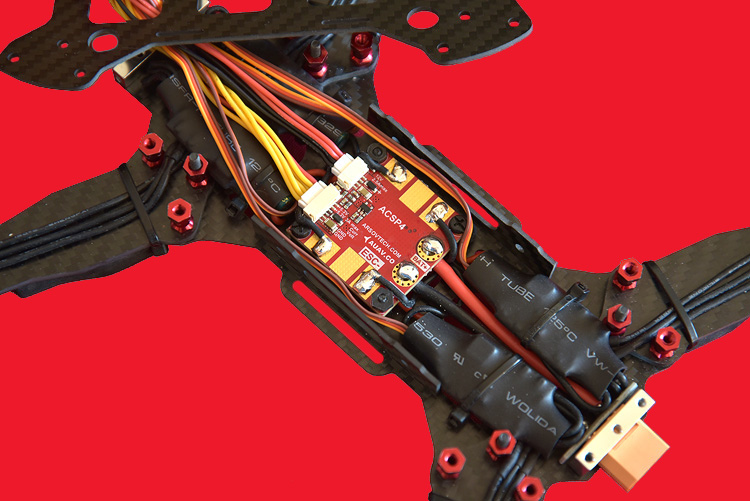
- 之后,开始组装底部,36x36mm AUAV ACSP4电源模块/PDB和ESC非常适合。
- 如果使用ESC w/o散热器,建议将它们安装在提供气流的臂的顶部。
- 最好安装带有分流电阻的ACSP4,用于电流感应阳光下降。
- 因为它可能会变热,所以必须确保没有电线接触它。
- 因为导电碳可能导致短路,所以要注意所有导线绝缘都没有损坏是非常重要的。
- 如果不需要12V电源/PDB,则可提供更小(17x17mm)的新型ACSP5电源模块,提供I/U感应和5V BEC。
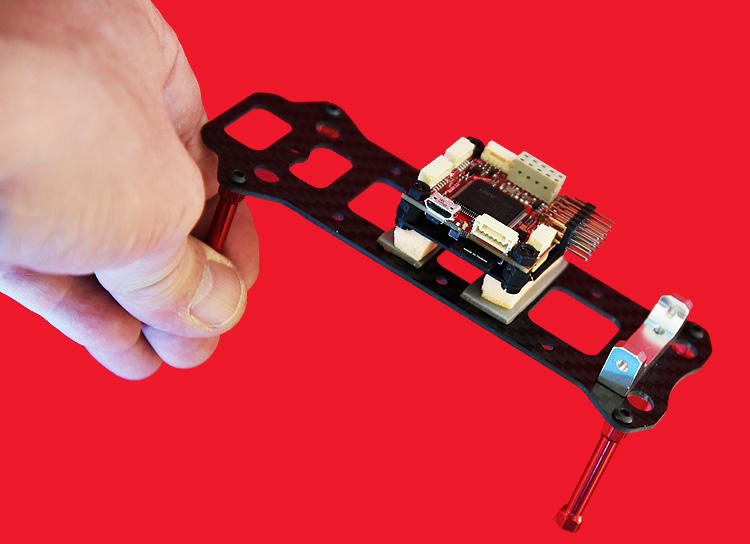
- Pixracer在电池仓上方的1楼软装。
- 这似乎是浪费空间,但是需要大约20mm的空间用于电线间隙,因为紧密连接的电线会严重影响振动阻尼。
- 附录:使用Althold和GPS模式的所有高级飞行包和自动驾驶仪都需要有效阻尼。
- 虽然周围仍有空间,但大多数构建/控制器/飞行包都受到振动的影响,导致核心问题Aliasing/Clipping。

- PX4软件包也记录了这些影响,因此很容易分析它们。
- 示例图显示振动引起的压差峰值是单向的,而不是高于和低于传感器值。
- 这会改变信号的中心,错误地“告诉”飞行控制器上升或下降的高度。
- 虽然较新的EKF滤波器算法旨在将其处理到一定量,但最好通过所示的软安装来防止这样的影响。

- 这可以通过3DR泡沫垫或HK橙色乳胶来实现。
- 后者不是自粘性的,但3M 5925F等双面胶带可以很好地完成这项工作。
- 如果Pixracer没有使用外壳,则焊盘会粘在36x36mm光纤或碳纤维板下方,同时也会挤压baro传感器顶部的强制泡沫。
- 这种泡沫减少了传感器上的所有光线和大部分气流冲击。
- 建议将电缆固定在Pixracer下面,以防止在放置电池时损坏或重新安置。
- 用于电机线的拉链是值得讨论的。 如果一只手臂断裂,损坏可能更大。
- 对于所需的X Quad配置,根据下面所示的布局连接四个电机,因此MAIN1连接器应连接到电机1的ESC,依此类推。
.png)
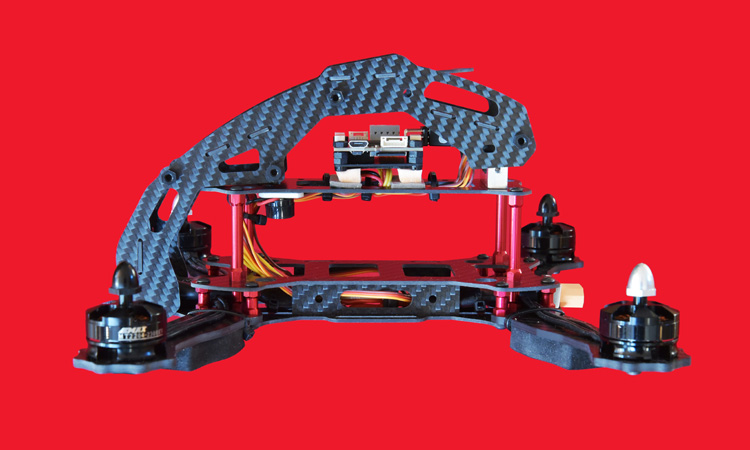
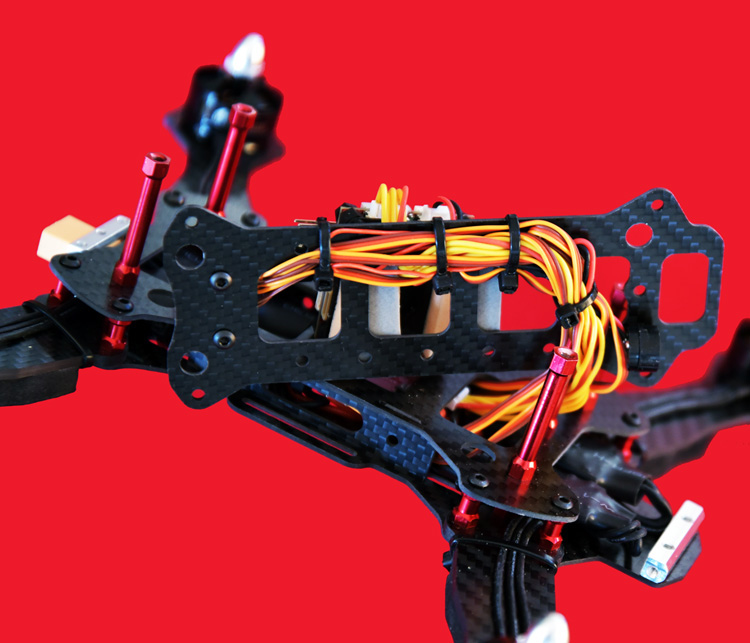
- 侧视图显示了电池和其他插件的大量空间,如FPV Cam/Tx,RC Rx,OSD和3DR radio(如果没有使用随Pixracer提供的ESP 8266 Wifi板。)
- 压电扬声器安装在阳光下 靠近前面站着。
- 完全不需要提供Pixracer套件的安全开关。
- PX4软件包没有使用它。
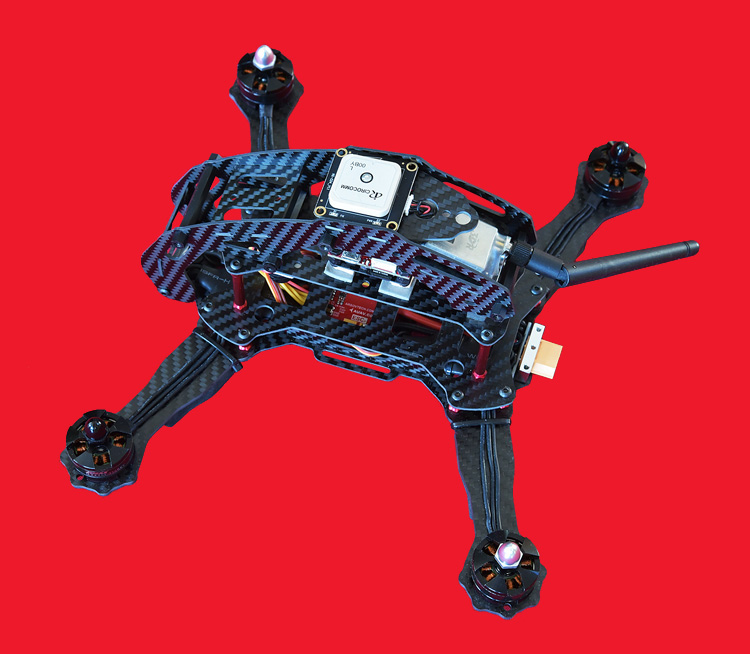
- 具有PX4软件包的Pixracer提供了几种GPS相关的飞行模式,例如自动任务,升降,位置控制和返回陆地。
- 如果GPS不仅用于后者,建议安装一个具有并发GPS/GLONASS能力的更好的GNSS单元。
- 在35x35mm板上使用U-BLOX M8N的任何类型都适合@2楼,作为桅杆替代品。
- 最好在机载上使用带有MAG传感器的GNSS bord,因为飞行控制器的内部MAG总是容易受到EMI影响并构建相关的偏移。
- 这些可能会导致TBE(马桶)效应,影响GPS模式。

- Robocat框架的可折叠上部允许轻松访问Pixracer和其他外部组件。
- 与Pixracer套件一起提供的布线将足够长,适合此应用。
- 对于其他人来说,可能需要将它们加长,这比用JST-GH连接器压接新的更容易。
- AUAV.CO为多种应用提供各种替代品。
- 当一切准备就绪时,可以使用QGroundControl进行配置和校准。
机身配置
- 选择QAV250配置,如下所示。
- 这不仅会使PX4进入四旋翼模式,还会加载适当的默认调谐增益。
.png)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号