



















PX4用户指南-机身构建-多旋翼 -spedix_s250_pixracer
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4用户指南-机身构建-多旋翼 -spedix_s250_pixracer
说明:
- Spedix S250是一款完整的宽臂赛车四轴飞行器,非常适合Pixracer自动驾驶仪。
硬件
- 此构建所需的硬件如下所示。

安装和接线
- 按照Pixracer说明中的说明连接GPS和Wifi模块。
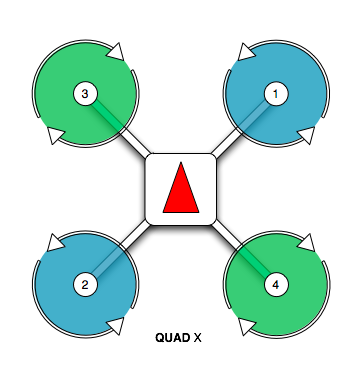
- 按照下图所示连接布局和顺序中的四个电机,因此MAIN1连接器应连接到电机1,依此类推。
机身配置
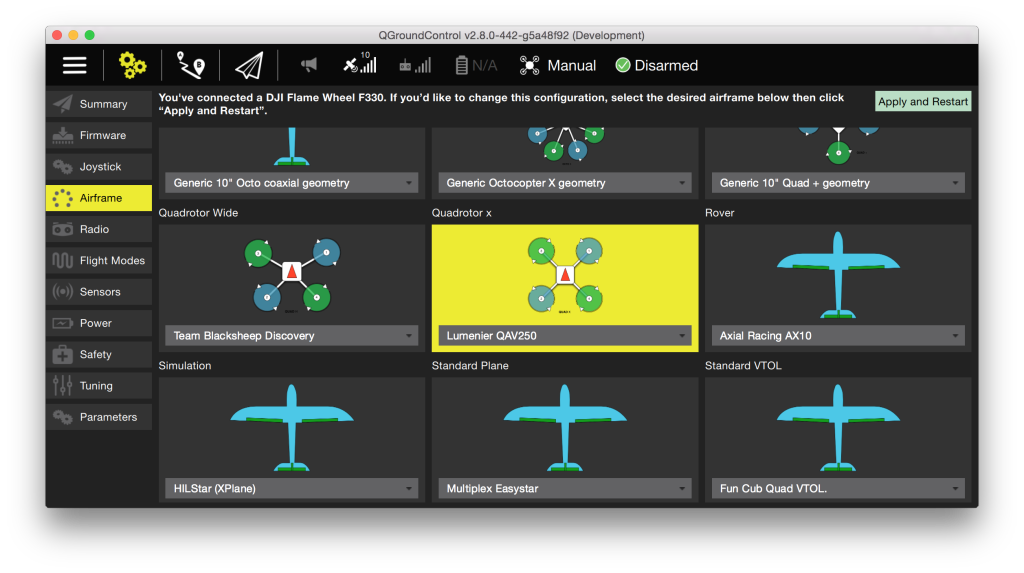
- 选择QAV250配置,如下所示。
- 这不仅会使PX4进入四旋翼模式,还会加载适当的默认调谐增益。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号